

Question: 01 25 L1 L2 02 03 Consider the RRP robot shown above with the end effector attached at the tip of the chain. L
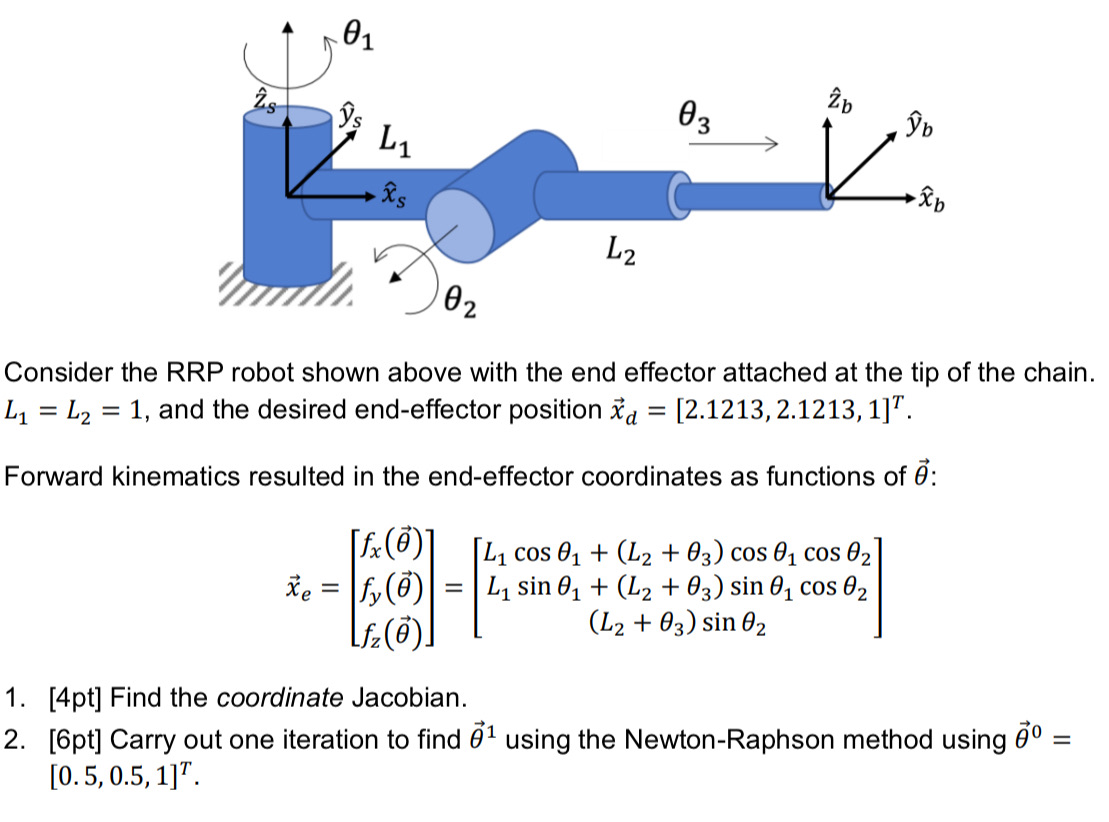
01 25 L1 L2 02 03 Consider the RRP robot shown above with the end effector attached at the tip of the chain. L = L2 = 1, and the desired end-effector position d = [2.1213, 2.1213, 1]. Forward kinematics resulted in the end-effector coordinates as functions of : Xe = [fx (0)] fy () [L cos 01 + (L2 +03) COS 0 COS 02 = L sin 0 + (L2 + 03) sin 0 cos 02 (L2 +03) sin 02 1. [4pt] Find the coordinate Jacobian. 2. [6pt] Carry out one iteration to find 0 using the Newton-Raphson method using 0 - = [0.5, 0.5, 1]T.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock