

Question: 1 0 . Given a unity feedback system as shown below with the given ( mathrm { G } ( mathrm {
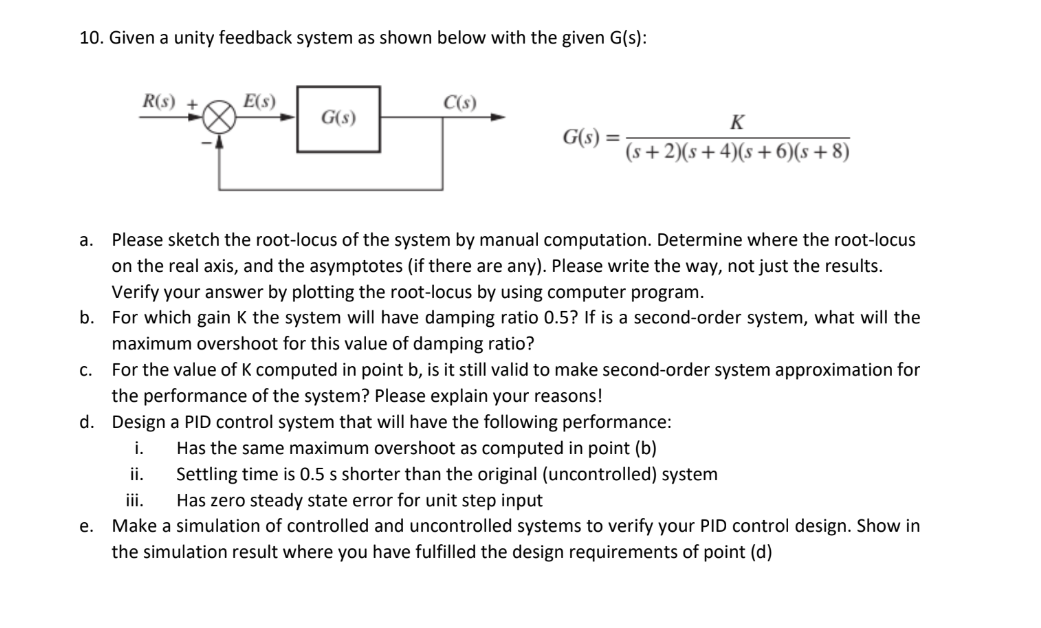
Given a unity feedback system as shown below with the given mathrmGmathrms :
GsfracKssss
a Please sketch the rootlocus of the system by manual computation. Determine where the rootlocus on the real axis, and the asymptotes if there are any Please write the way, not just the results. Verify your answer by plotting the rootlocus by using computer program.
b For which gain K the system will have damping ratio If is a secondorder system, what will the maximum overshoot for this value of damping ratio?
c For the value of K computed in point b is it still valid to make secondorder system approximation for the performance of the system? Please explain your reasons!
d Design a PID control system that will have the following performance:
i Has the same maximum overshoot as computed in point b
ii Settling time is s shorter than the original uncontrolled system
iii. Has zero steady state error for unit step input
e Make a simulation of controlled and uncontrolled systems to verify your PID control design. Show in the simulation result where you have fulfilled the design requirements of point d
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock