

Question: 1. 2. 3. Using rigid body kinetics, find equations for the position, velocity, and acceleration vectors of pin A relative to the pivot point,
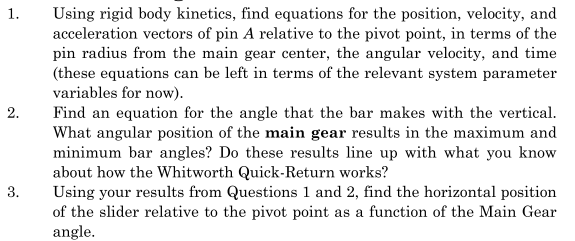
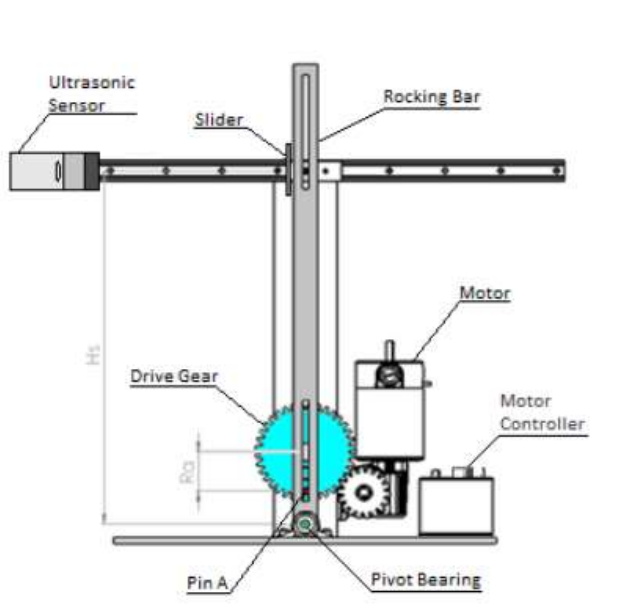
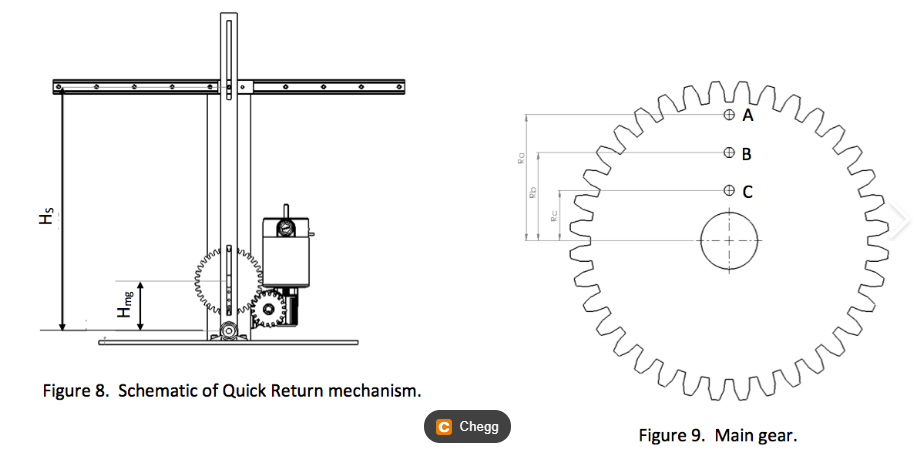
1. 2. 3. Using rigid body kinetics, find equations for the position, velocity, and acceleration vectors of pin A relative to the pivot point, in terms of the pin radius from the main gear center, the angular velocity, and time (these equations can be left in terms of the relevant system parameter variables for now). Find an equation for the angle that the bar makes with the vertical. What angular position of the main gear results in the maximum and minimum bar angles? Do these results line up with what you know about how the Whitworth Quick-Return works? Using your results from Questions 1 and 2, find the horizontal position of the slider relative to the pivot point as a function of the Main Gear angle. Ultrasonic Sensor SH Rocking Bar Slider Drive Gear Motor Motor Controller Pin A Pivot Bearing Hs Hmg Figure 8. Schematic of Quick Return mechanism. DA C Chegg Figure 9. Main gear. B C
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts