

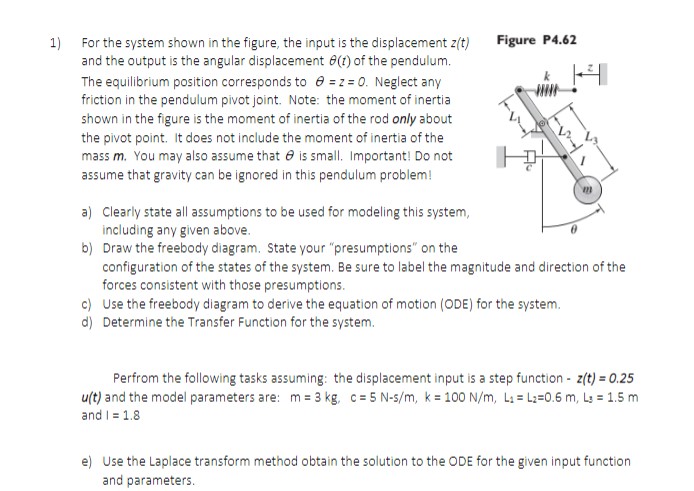
Question: 1) For the system shown in the figure, the input is the displacement z(t) Figure P4.62 and the output is the angular displacement e() of
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts