

Question: 1-The PRR type robot is given in the figure (Variables d1-02-03). second and third joints centers are coincident. According to the Denavit Hartenberg method:
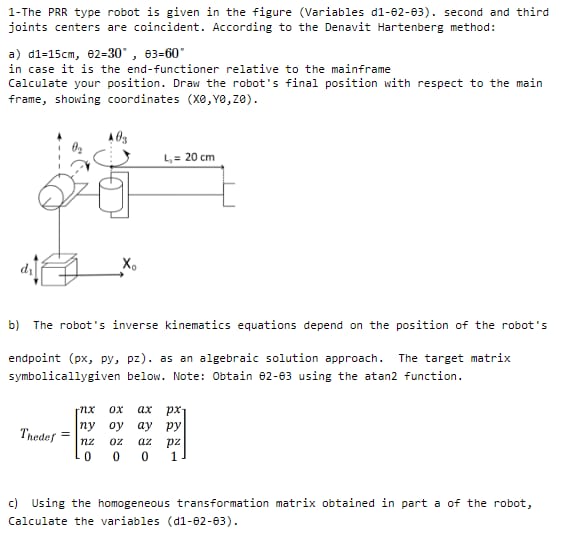
1-The PRR type robot is given in the figure (Variables d1-02-03). second and third joints centers are coincident. According to the Denavit Hartenberg method: a) d1-15cm, 82-30, 63-60" in case it is the end-functioner relative to the mainframe Calculate your position. Draw the robot's final position with respect to the main frame, showing coordinates (X0, Y0, 20). 403 L = 20 cm b) The robot's inverse kinematics equations depend on the position of the robot's endpoint (px, py, pz). as an algebraic solution approach. The target matrix symbolicallygiven below. Note: Obtain 62-63 using the atan2 function. Thedef = rnx ox ax px ny oy ay py nz oz az pz 1 0 0 0 c) Using the homogeneous transformation matrix obtained in part a of the robot, Calculate the variables (d1-82-83).
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts