

Question: 2 . A climbing robot has been invented for many applications. The robot can be modeled by a particle mass ( m )
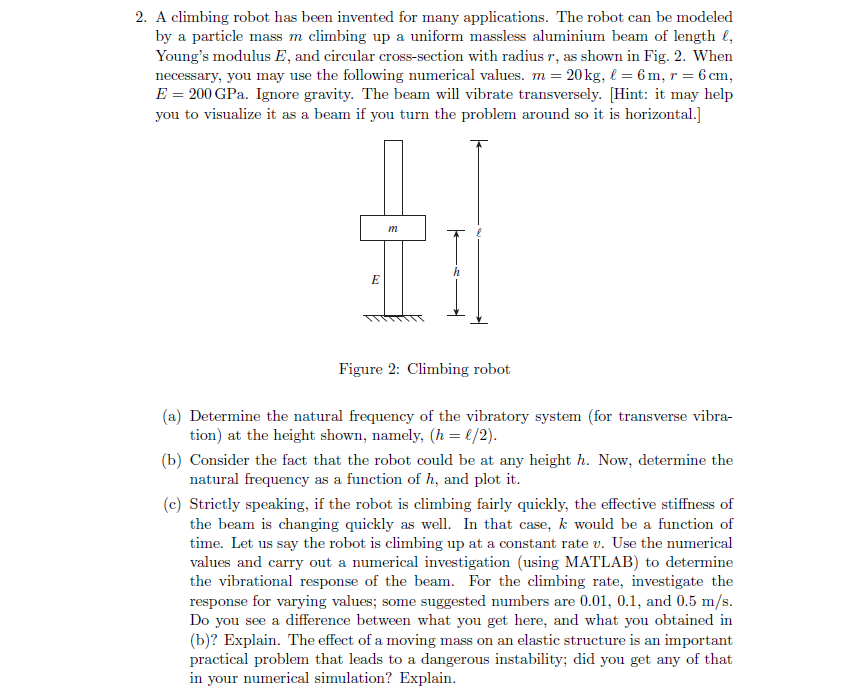
A climbing robot has been invented for many applications. The robot can be modeled by a particle mass m climbing up a uniform massless aluminium beam of length ell Young's modulus E and circular crosssection with radius r as shown in Fig. When necessary, you may use the following numerical values. mmathrm~kgellmathrm~m rmathrm~cm EmathrmGPa Ignore gravity. The beam will vibrate transversely. Hint: it may help you to visualize it as a beam if you turn the problem around so it is horizontal.
Figure : Climbing robot
a Determine the natural frequency of the vibratory system for transverse vibration at the height shown, namely, hell
b Consider the fact that the robot could be at any height h Now, determine the natural frequency as a function of h and plot it
c Strictly speaking, if the robot is climbing fairly quickly, the effective stiffness of the beam is changing quickly as well. In that case, k would be a function of time. Let us say the robot is climbing up at a constant rate v Use the numerical values and carry out a numerical investigation using MATLAB to determine the vibrational response of the beam. For the climbing rate, investigate the response for varying values; some suggested numbers are and mathrm~mmathrms Do you see a difference between what you get here, and what you obtained in b Explain. The effect of a moving mass on an elastic structure is an important practical problem that leads to a dangerous instability; did you get any of that in your numerical simulation? Explain.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock