

Question: 2. (a) In computer graphics and robot kinematics the positions of objects are described using homogeneous coordinates rather than Cartesian coordinates. In general, the Cartesian
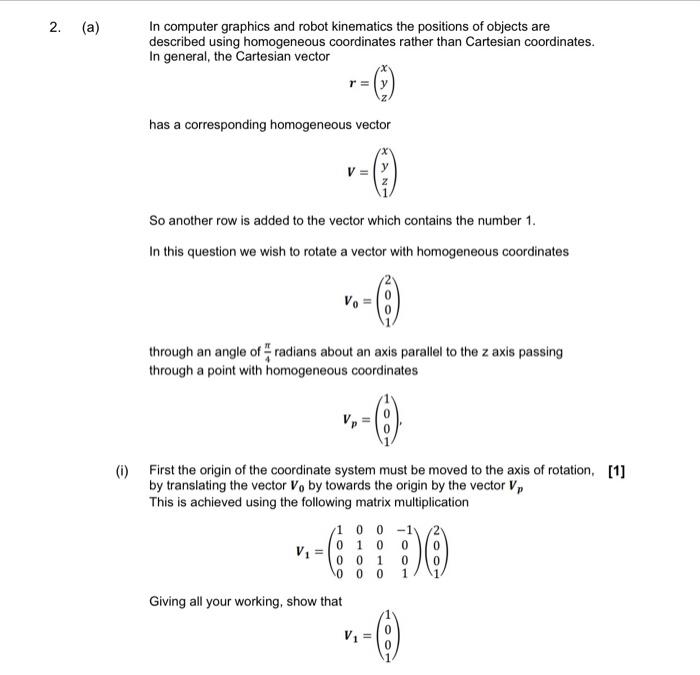
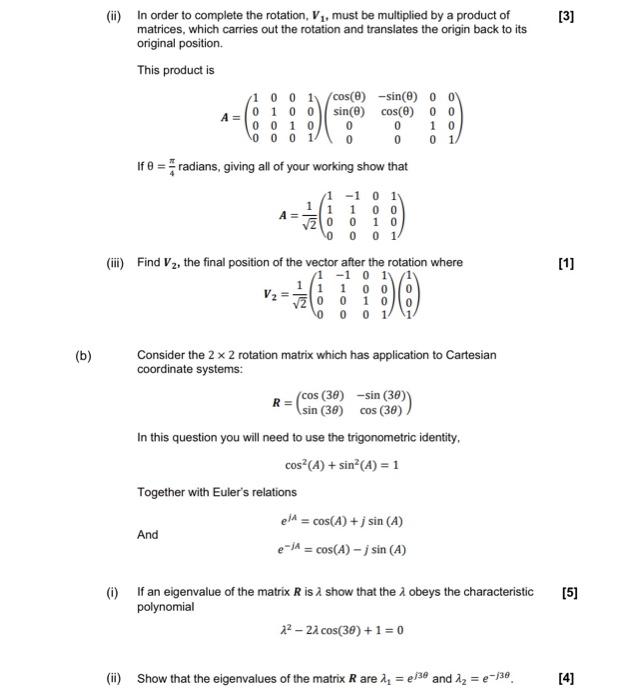
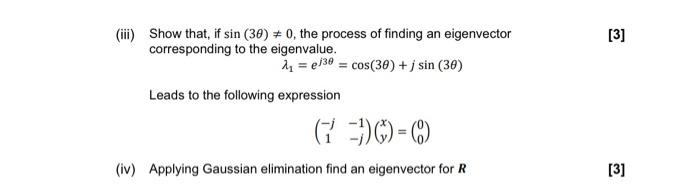
2. (a) In computer graphics and robot kinematics the positions of objects are described using homogeneous coordinates rather than Cartesian coordinates. In general, the Cartesian vector r= (y has a corresponding homogeneous vector V=/y -- Z So another row is added to the vector which contains the number 1. In this question we wish to rotate a vector with homogeneous coordinates --- through an angle of radians about an axis parallel to the z axis passing through a point with homogeneous coordinates 0 (0) First the origin of the coordinate system must be moved to the axis of rotation. [1] by translating the vector V, by towards the origin by the vector V This is achieved using the following matrix multiplication 1 0 0 -1 VI 0 1 0 0 0 1 0 0 0 Giving all your working, show that 0 0 0 1 V [3] 0 1 0 0 0 1. (ii) In order to complete the rotation, V, must be multiplied by a product of matrices, which carries out the rotation and translates the origin back to its original position This product is 1001 cos() -sin(0) 0 0 A = 010 o sin() cos(O) 0 0010 0001 Ife = radians, giving all of your working show that 11 -1 0 1 1 1 1 0 0 1 0 o o o 12 (ii) Find V2, the final position of the vector after the rotation where 11 -1 0 1 1 1 0 0 0 VEO 0 1 0 0 0001 A= VIO 0 [ [1] 1 (b) Consider the 2 x 2 rotation matrix which has application to Cartesian coordinate systems: R COS (30) -sin (30) sin (36) Cos (30) In this question you will need to use the trigonometric identity, cos(A) + sin(A) = 1 Together with Euler's relations ela = cos(A) +j sin (A) And e-11 = cos(A) i sin (4) [5] (i) If an eigenvalue of the matrix R is a show that the obeys the characteristic polynomial 12 - 21 cos(38) + 1 = 0 (ii) Show that the eigenvalues of the matrix Rare 12 = 2/38 and 12 = -338 [3] (iii) Show that, if sin (30) # 0, the process of finding an eigenvector corresponding to the eigenvalue. * = e/30 = cos(30) + sin (30) Leads to the following expression (i =})() = (0) (iv) Applying Gaussian elimination find an eigenvector for R [3]
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts