

Question: ( 2 ) A servomechanism position control has the plant transfer function G ( s ) = 1 0 s ( s + 1 )
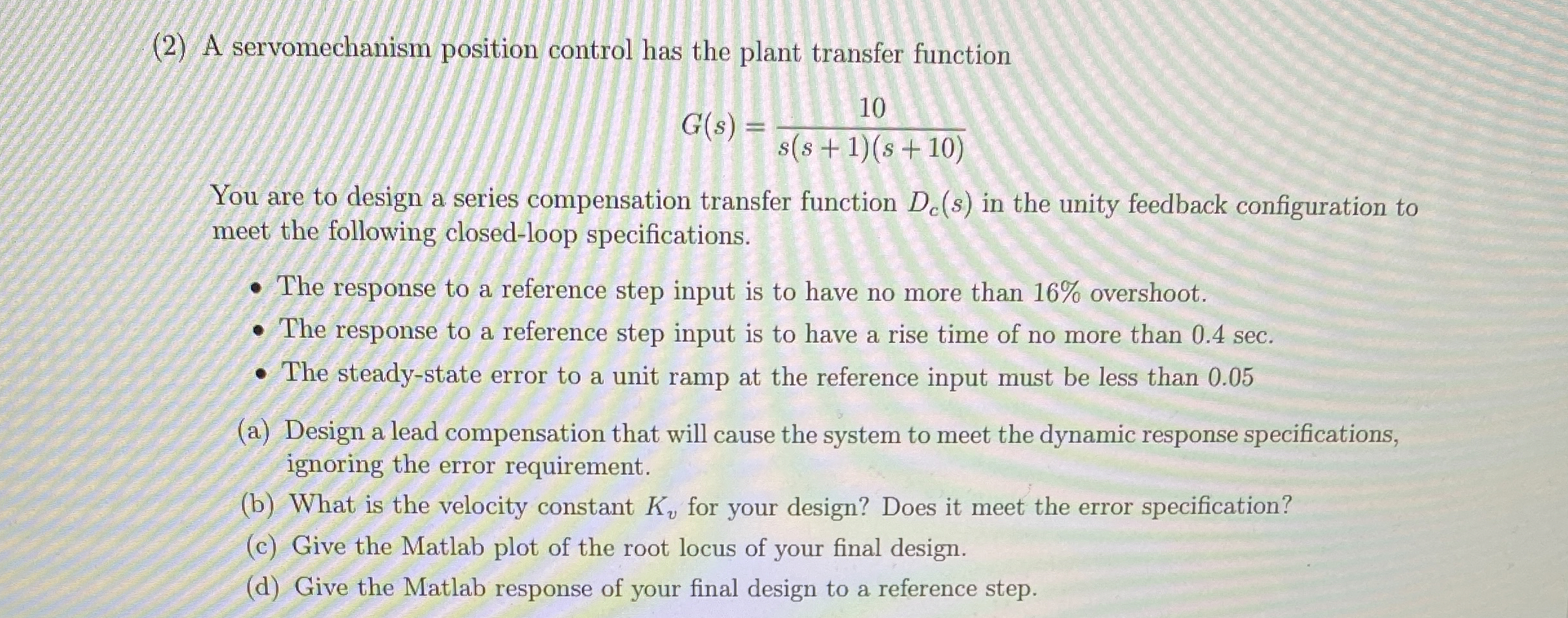
A servomechanism position control has the plant transfer function
You are to design a series compensation transfer function in the unity feedback configuration to meet the following closedloop specifications.
The response to a reference step input is to have no more than overshoot.
The response to a reference step input is to have a rise time of no more than sec
The steadystate error to a unit ramp at the reference input must be less than
a Design a lead compensation that will cause the system to meet the dynamic response specifications, ignoring the error requirement.
b What is the velocity constant for your design? Does it meet the error specification?
c Give the Matlab plot of the root locus of your final design.
d Give the Matlab response of your final design to a reference step.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock