

Question: 2 - For the position control of a robot arm a digital PID controller has been used. The gain values of ? P I D
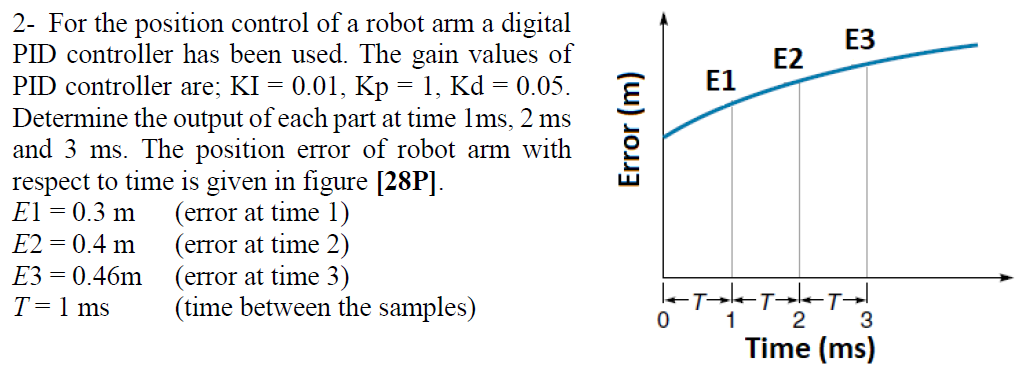
For the position control of a robot arm a digital
PID controller has been used. The gain values of
controller are;
Determine the output of each part at time
and The position error of robot arm with
respect to time is given in figure P
time
time
time
between the samples
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock