

Question: 2) For the simple two-joint robotic arm shown in Figure 1, the coordinates of point A are given by 4 XA = cose +
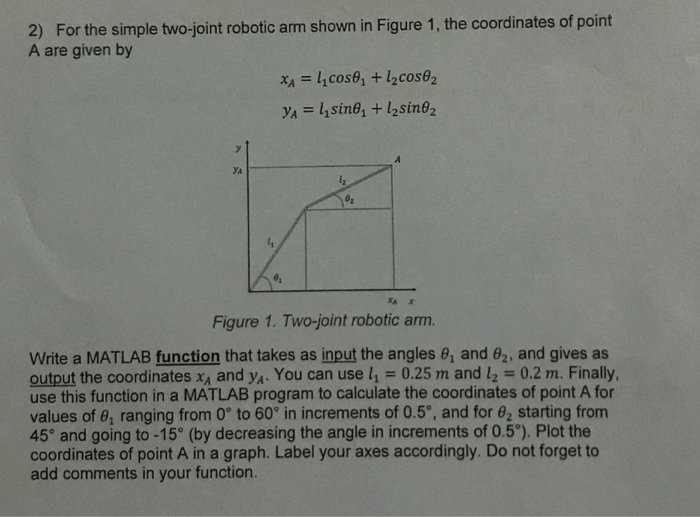
2) For the simple two-joint robotic arm shown in Figure 1, the coordinates of point A are given by 4 XA = cose + lcose YA Lsine + lsin0 0 19 ZA X Figure 1. Two-joint robotic arm. Write a MATLAB function that takes as input the angles 8 and 02, and gives as output the coordinates XA and yA. You can use l = 0.25 m and l = 0.2 m. Finally, use this function in a MATLAB program to calculate the coordinates of point A for values of 8, ranging from 0 to 60 in increments of 0.5, and for 82 starting from 45 and going to -15 (by decreasing the angle in increments of 0.5). Plot the coordinates of point A in a graph. Label your axes accordingly. Do not forget to add comments in your function.
Step by Step Solution
3.37 Rating (147 Votes )
There are 3 Steps involved in it
To solve this problem you need to create a MATLAB function and a script to compute the coordinates o... View full answer

Get step-by-step solutions from verified subject matter experts