

Question: ( 2 ) GIVEN ( 4 0 PTS ) : VLE FOR KINEMATIC ANALYSES A LDOF kinematic mechanism is shown below ( not to scale
GIVEN PTS: VLE FOR KINEMATIC ANALYSES
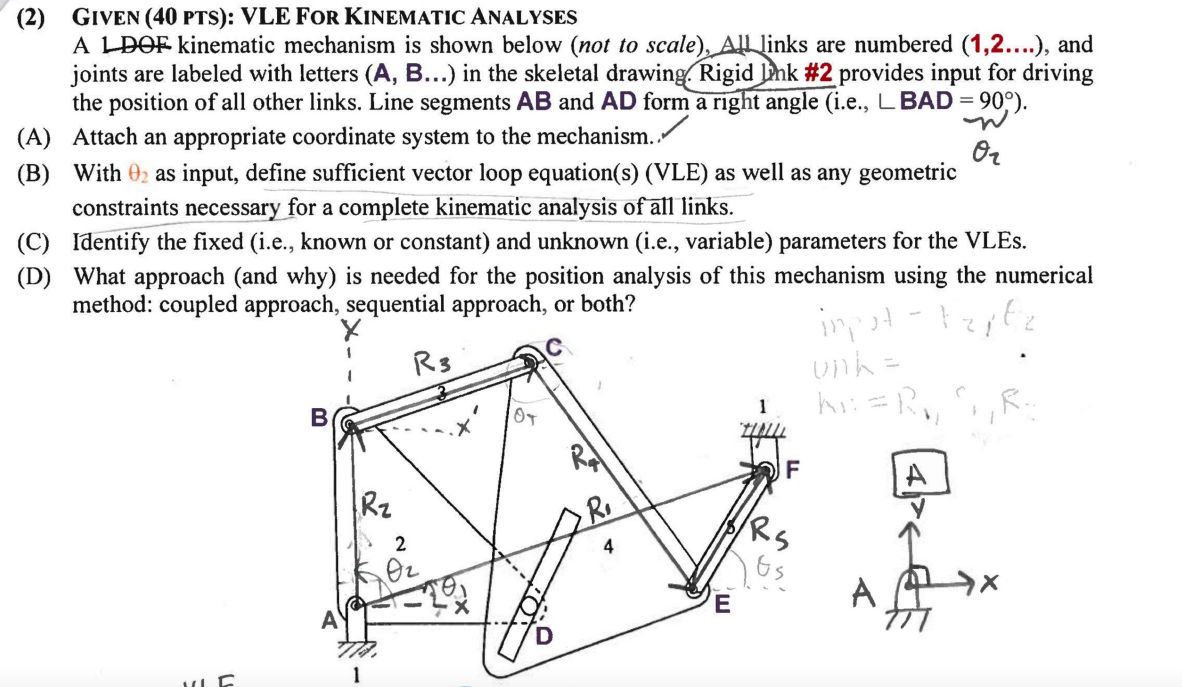
A LDOF kinematic mechanism is shown below not to scale All links are numbered dots and
joints are labeled with letters A B in the skeletal drawing Rigid lenk # provides input for driving
the position of all other links. Line segments and form a right angle ie LBAD
A Attach an appropriate coordinate system to the mechanism.
B With as input, define sufficient vector loop equationsVLE as well as any geometric
constraints necessary for a complete kinematic analysis of all links.
C Identify the fixed ie known or constant and unknown ie variable parameters for the VLEs.
D What approach and why is needed for the position analysis of this mechanism using the numerical
method: coupled approach, sequential approach, or both?
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock