

Question: 2. Tha 4R planar open-chain robot below has an end-effector frame ib at its tip. where sin2=sin(2+3), etc. Suppote I1=I2=I3=I4=1 and the chain is at
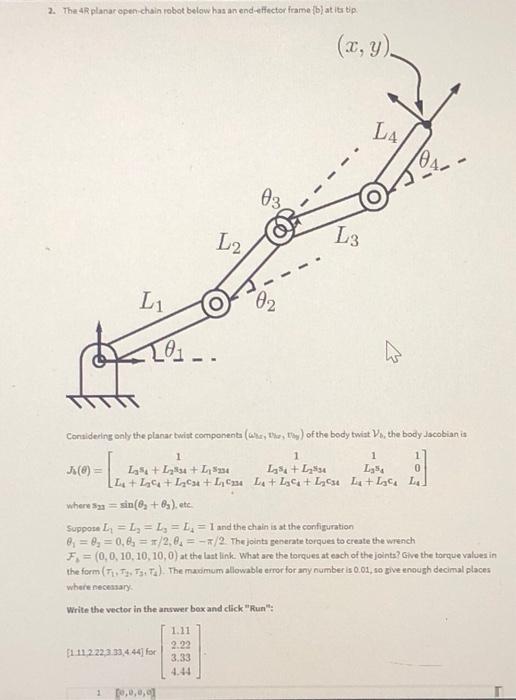
2. Tha 4R planar open-chain robot below has an end-effector frame ib at its tip. where sin2=sin(2+3), etc. Suppote I1=I2=I3=I4=1 and the chain is at the configuration 1=2=0,3=/2,4=/2. Thejpinta generate torquea to create the wiench Fs=(0,0,10,10,10,0) at the last link. What are the torques at each of the joints? Give the torque values in the form (1,y,3+4). The madmum allowable error for any number is 0.01 , so give enough decimal places wherenecesary: Write the wector in the answer boxand click "Run": [111,2.22,3.31,4:44]fise1.112.223.334.44
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock