

Question: 2. The 4R planar open-chain robot below has an end-effector frame {b} at its tip. (x, y). L Jb(0) = 10 L2 1 L3S4
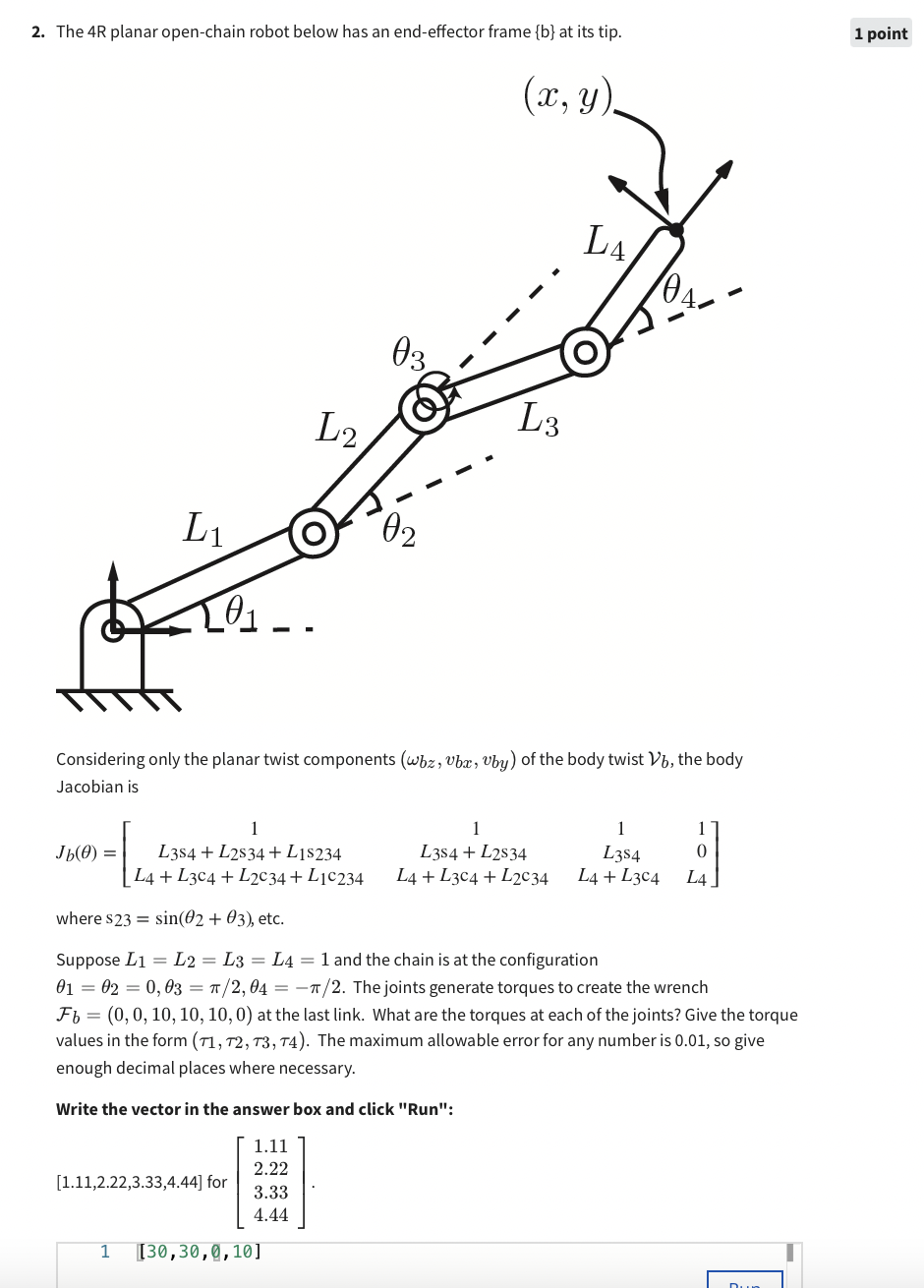
2. The 4R planar open-chain robot below has an end-effector frame {b} at its tip. (x, y). L Jb(0) = 10 L2 1 L3S4 + L2834 + L1$234 L4 + L3c4 + L2c34+ L1c234 [1.11,2.22,3.33,4.44] for 03 Considering only the planar twist components (wbz, vbx, vby) of the body twist V6, the body Jacobian is 1 [30,30,0,10] 02 L3 LA 1 L3S4 + L2834 L4 + L3c4 + L2c34 1 L384 L4 + L3c4 where $23 = sin(02 +03), etc. Suppose L1 L2 = L3= L4 = 1 and the chain is at the configuration 01 02 = 0,03 = /2,04 = /2. The joints generate torques to create the wrench Fb (0, 0, 10, 10, 10, 0) at the last link. What are the torques at each of the joints? Give the torque values in the form (71, 72, 73, 74). The maximum allowable error for any number is 0.01, so give enough decimal places where necessary. Write the vector in the answer box and click "Run": 1.11 2.22 3.33 4.44 1 0 L4 Dun 1 point
Step by Step Solution
There are 3 Steps involved in it
The image you provided describes a 4R planar robot arm along with its kinematic configuration dimensions L1 L2 L3 L4 and joint angles theta1 theta2 th... View full answer

Get step-by-step solutions from verified subject matter experts