

Question: 2.2 Controller Design An IPD Controller can be incorporated into the closed loop model (Figure 2.2) in order to meet a set of time response
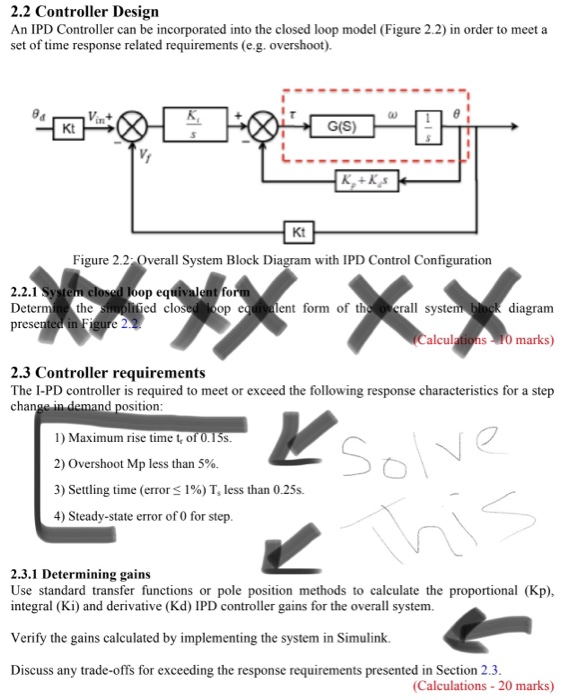
2.2 Controller Design An IPD Controller can be incorporated into the closed loop model (Figure 2.2) in order to meet a set of time response related requirements (e.g. overshoot). Kt G(S) Kt Figure 2.2 Il System Block Diagram with IPD Control Configuration 2.2.1 Determine the pre loop eq fo ed closed oop equivelent form of the o crall syster diagram alcul marks) 2.3 Controller requirements The I-PD controller is required to meet or exceed the following response characteristics for a step chan nd position 1) Maximum rise timet,of 0.15s. 2) Overshoot Mp less than 5%. 3) Settling time (error 196) T, less than 0.25s. 4) Steady-state error of 0 for step 2.3.1 Determining gains Use standard transfer functions or pole position methods to calculate the proportional (Kp), integral (Ki and derivative (Kd) IPD controller gains for the overall system. Verify the gains calculated by implementing the system in Simulink. Discuss any trade-offs for exceeding the response requirements presented in Section 2.3 Calculations-20 marks)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts