

Question: 3 . 2 . 1 Affine transformations and modelling joint positions and velocities Suppose to have the three joints robot shown in the picture. Find
Affine transformations and modelling joint positions and velocities
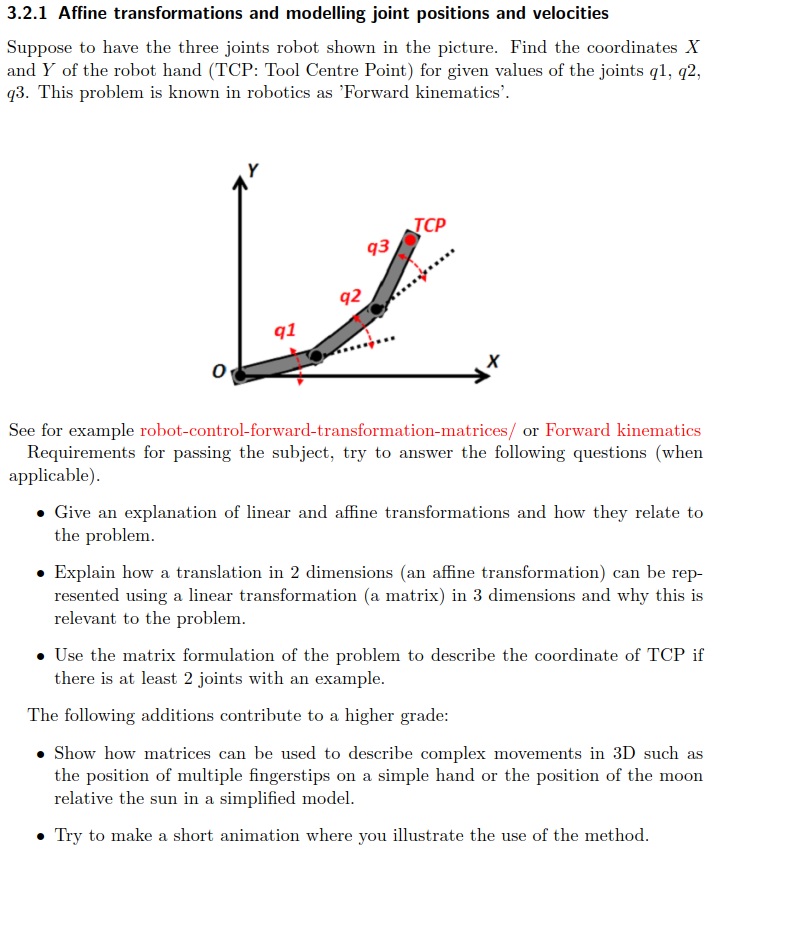
Suppose to have the three joints robot shown in the picture. Find the coordinates
and of the robot hand TCP: Tool Centre Point for given values of the joints
q This problem is known in robotics as 'Forward kinematics'.
See for example robotcontrolforwardtransformationmatrices or Forward kinematics
Requirements for passing the subject, try to answer the following questions when
applicable
Give an explanation of linear and affine transformations and how they relate to
the problem.
Explain how a translation in dimensions an affine transformation can be rep
resented using a linear transformation a matrix in dimensions and why this is
relevant to the problem.
Use the matrix formulation of the problem to describe the coordinate of TCP if
there is at least joints with an example.
The following additions contribute to a higher grade:
Show how matrices can be used to describe complex movements in D such as
the position of multiple fingerstips on a simple hand or the position of the moon
relative the sun in a simplified model.
Try to make a short animation where you illustrate the use of the method.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock