

Question: Consider a planar parallel robot used in a surgical procedure to position a needle above the patient, see Figure 1 . Figure 1 . Needle
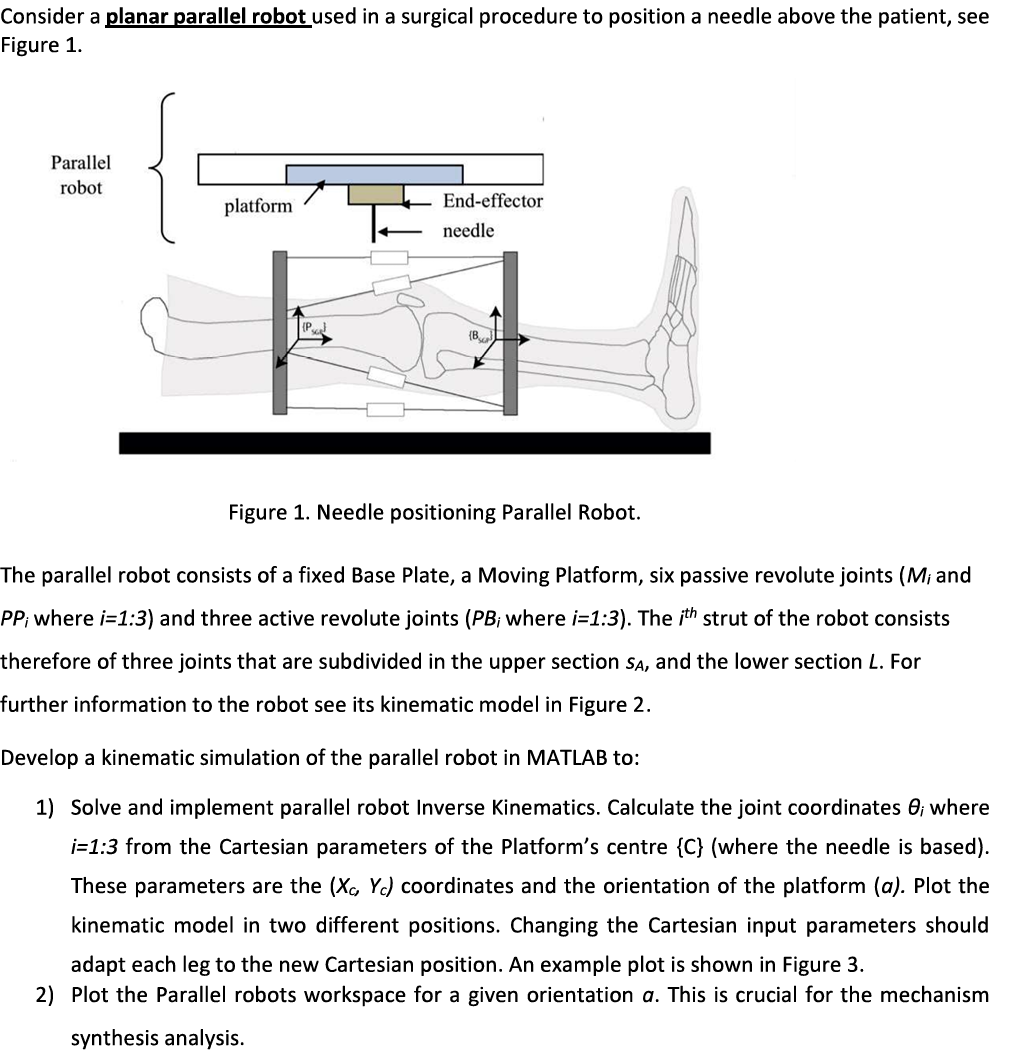
Consider a planar parallel robot used in a surgical procedure to position a needle above the patient, see
Figure
Figure Needle positioning Parallel Robot.
The parallel robot consists of a fixed Base Plate, a Moving Platform, six passive revolute joints and
where :: and three active revolute joints where :: The strut of the robot consists
therefore of three joints that are subdivided in the upper section and the lower section For
further information to the robot see its kinematic model in Figure
Develop a kinematic simulation of the parallel robot in MATLAB to:
Solve and implement parallel robot Inverse Kinematics. Calculate the joint coordinates where
: from the Cartesian parameters of the Platform's centre where the needle is based
These parameters are the coordinates and the orientation of the platform a Plot the
kinematic model in two different positions. Changing the Cartesian input parameters should
adapt each leg to the new Cartesian position. An example plot is shown in Figure
Plot the Parallel robots workspace for a given orientation This is crucial for the mechanism
synthesis analysis.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock