

Question: 3. (20 pts.) Some of the work I do involves estimating the position of an unmanned underwater vehicle at a particular time. The Kalman Filter
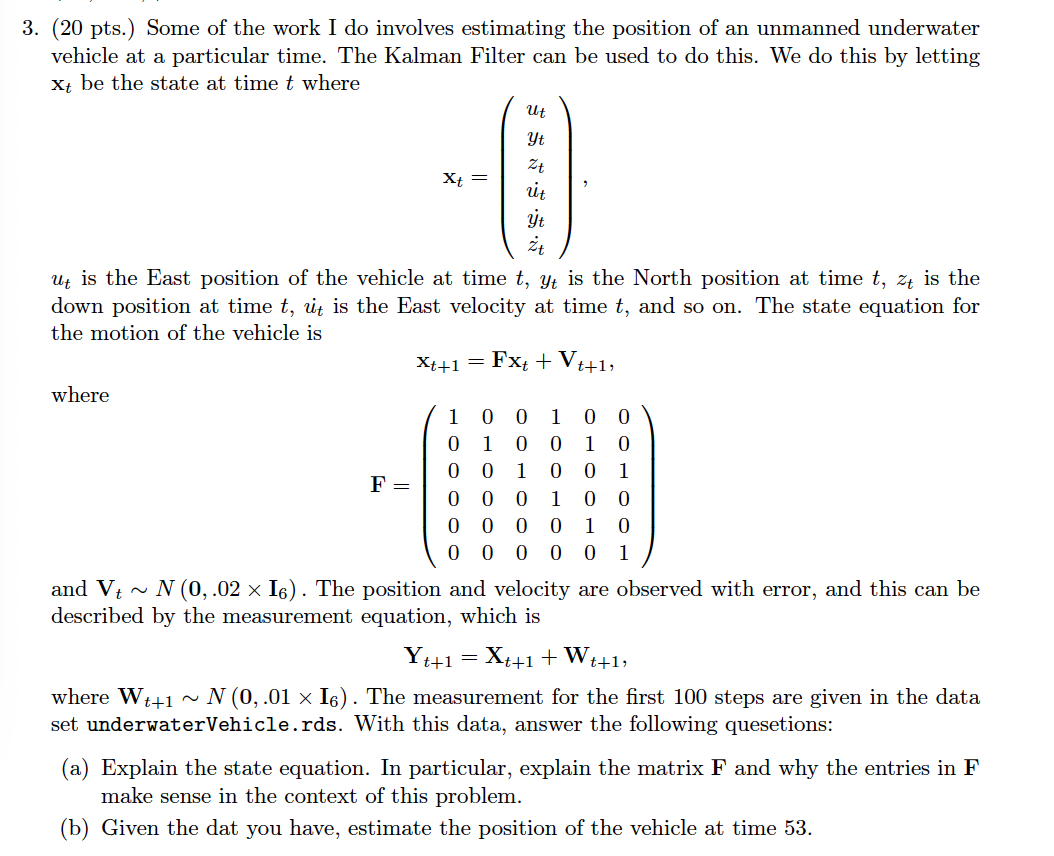
3. (20 pts.) Some of the work I do involves estimating the position of an unmanned underwater vehicle at a particular time. The Kalman Filter can be used to do this. We do this by letting x; be the state at time where Ut U Zt X = i Ut 2t u; is the East position of the vehicle at time , y; is the North position at time , z; is the down position at time %, 1. is the East velocity at time , and so on. The state equation for the motion of the vehicle is Xep1 = Fxg + Vi, where 1 0 01 0 O 01 00 10 p_|001001 0O 001 00O 0O 0 00 10 0O 00O O0OO0O1 and V ~ N (0,.02 x Ig) . The position and velocity are observed with error, and this can be described by the measurement equation, which is Yip = X1 + Wiy, where Wiy ~ N (0,.01 x Ig) . The measurement for the first 100 steps are given in the data set underwaterVehicle.rds. With this data, answer the following quesetions: (a) Explain the state equation. In particular, explain the matrix F and why the entries in F make sense in the context of this problem. (b) Given the dat you have, estimate the position of the vehicle at time 53
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts