

Question: 3 7 4 Chapter 2 0 Model Predictive Control The predicted unforced response hat ( y ) ( k + J ) can be calculated
Chapter Model Predictive Control
The predicted unforced response hat can be calculated from Eq with
The control law in Eq is based on a single prediction that is made for steps in the future. Note that the control law can be interpreted as the inverse of the predictive model in Eq
EXAMPLE
Apply the predictive control law of Example to a fifthorder process:
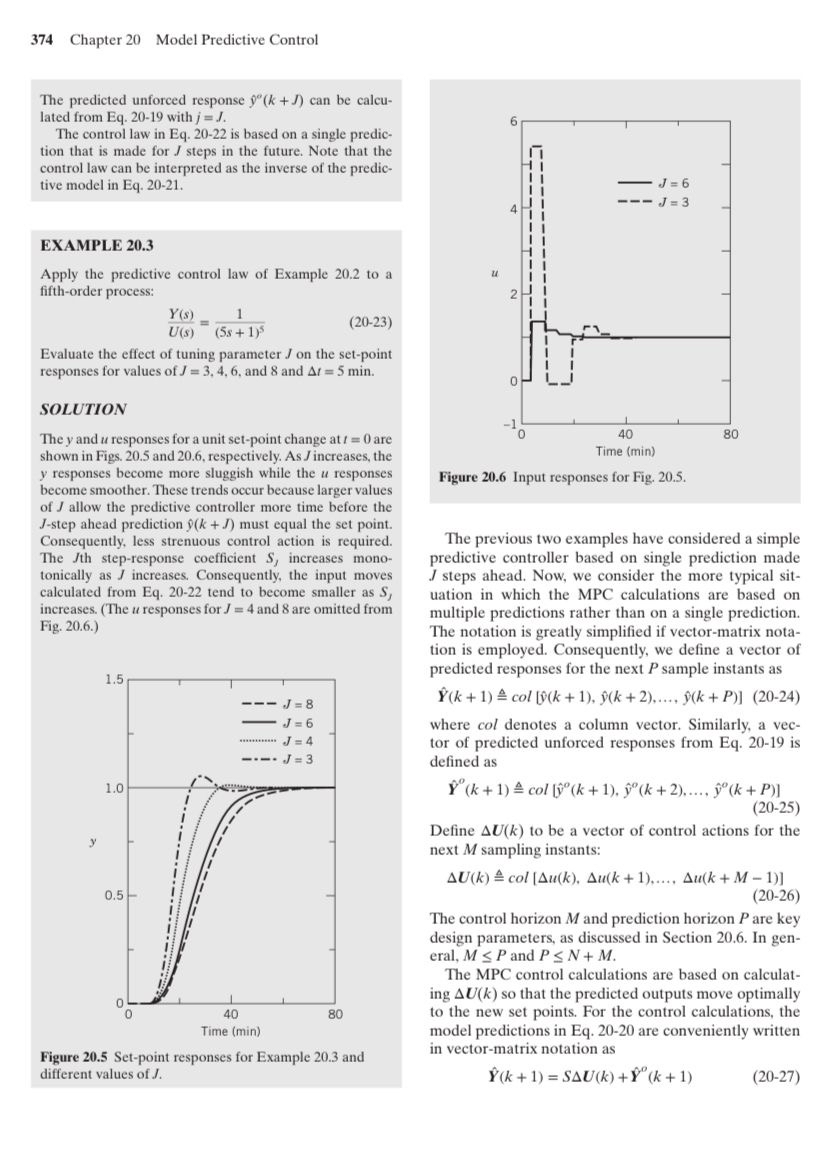
Evaluate the effect of tuning parameter on the setpoint responses for values of and and min.
SOLUTION
The and responses for a unit setpoint change at are shown in Figs. and respectively. As increases, the responses become more sluggish while the responses become smoother. These trends occur because larger values of allow the predictive controller more time before the step ahead prediction hat must equal the set point. Consequently, less strenuous control action is required. The th stepresponse coefficient increases monotonically as increases. Consequently, the input moves calculated from Eq tend to become smaller as increases. The responses for and are omitted from Fig. different values of
F
The previous two examples have considered a simple predictive controller based on single prediction made steps ahead. Now, we consider the more typical situation in which the MPC calculations are based on multiple predictions rather than on a single prediction. The notation is greatly simplified if vectormatrix notation is employed. Consequently, we define a vector of predicted responses for the next sample instants as
hathatdots,hat
where col denotes a column vector. Similarly, a vector of predicted unforced responses from Eq is defined as
hathatdots,hat
Define to be a vector of control actions for the next sampling instants:
dots,
The control horizon and prediction horizon are key design parameters, as discussed in Section In general, and
The MPC control calculations are based on calculating so that the predicted outputs move optimally to the new set points. For the control calculations, the model predictions in Eq are conveniently written in vectormatrix notation as
Solve the answer using similunk showing the indication
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock