

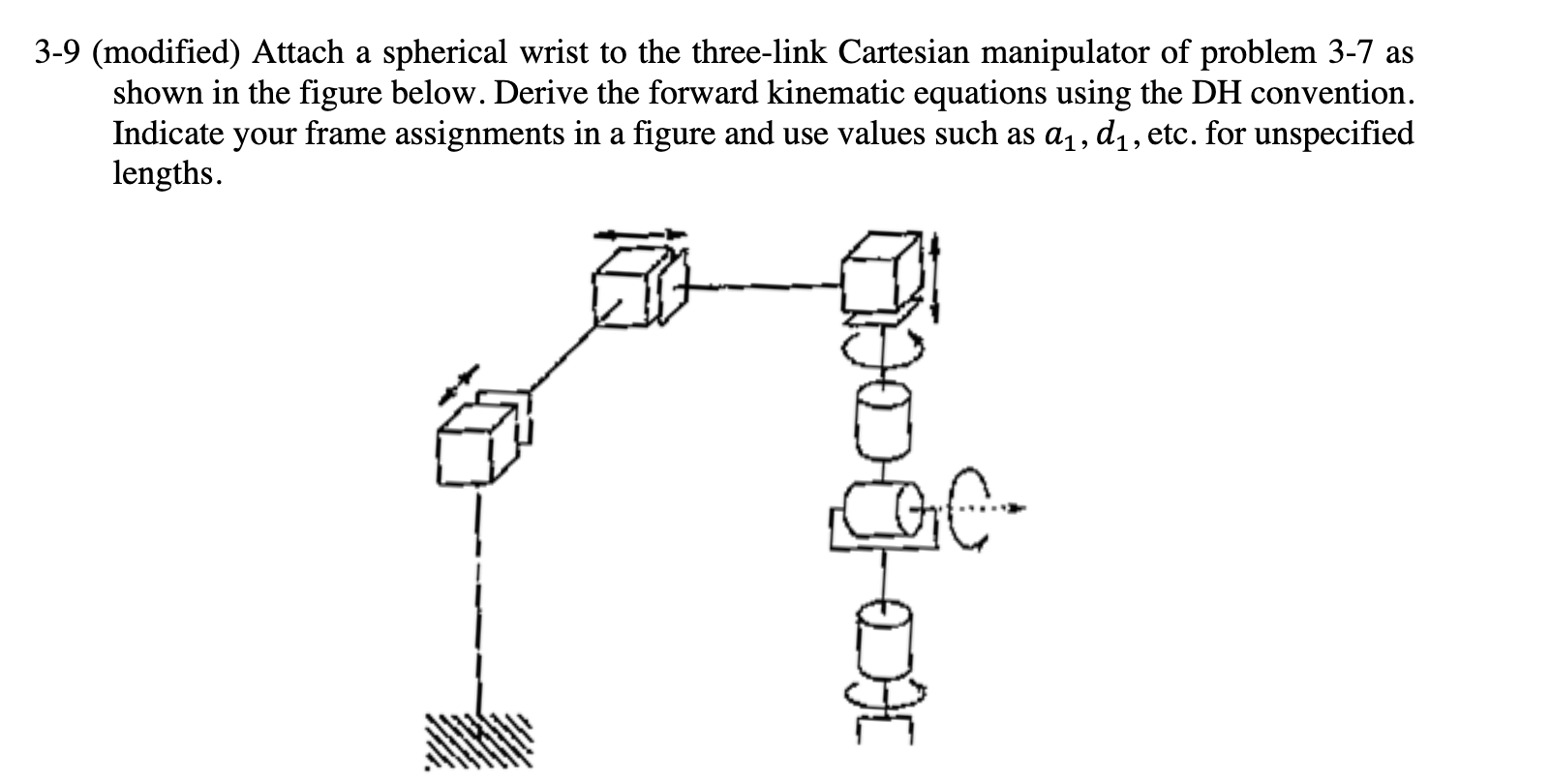
Question: 3 - 9 ( modified ) Attach a spherical wrist to the three - link Cartesian manipulator of problem 3 - 7 as shown in
modified Attach a spherical wrist to the threelink Cartesian manipulator of problem as
shown in the figure below. Derive the forward kinematic equations using the DH convention.
Indicate your frame assignments in a figure and use values such as etc. for unspecified
lengths.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock