

Question: 3.6. Two consecutive frames describe the old (Ti) and new (T2) positions and orientations of the end of a 3-DOF robot. The corresponding Jacobian
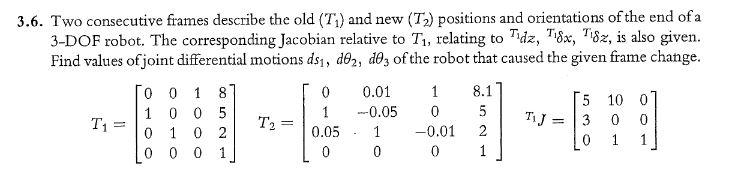
3.6. Two consecutive frames describe the old (Ti) and new (T2) positions and orientations of the end of a 3-DOF robot. The corresponding Jacobian relative to T, relating to Tidz, T8x, Ti8z, is also given. Find values of joint differential motions ds1, d02, d03 of the robot that caused the given frame change. T - - 0 0 1 8 0 0.01 1 8.1 1 0 0 5 1 -0.05 0 5 T = TiJ 5 10 0 == 3 0 0 0 02 0.05 1 -0.01 2 0 1 1 001 0 0 1
Step by Step Solution
There are 3 Steps involved in it
To find the values of joint differential motions ds1 de and des we can use the ... View full answer

Get step-by-step solutions from verified subject matter experts