

Question: 45 B VD 30 60 The robotic arm needs to be actuated so that the tip D, of the gripper CD, moves in the
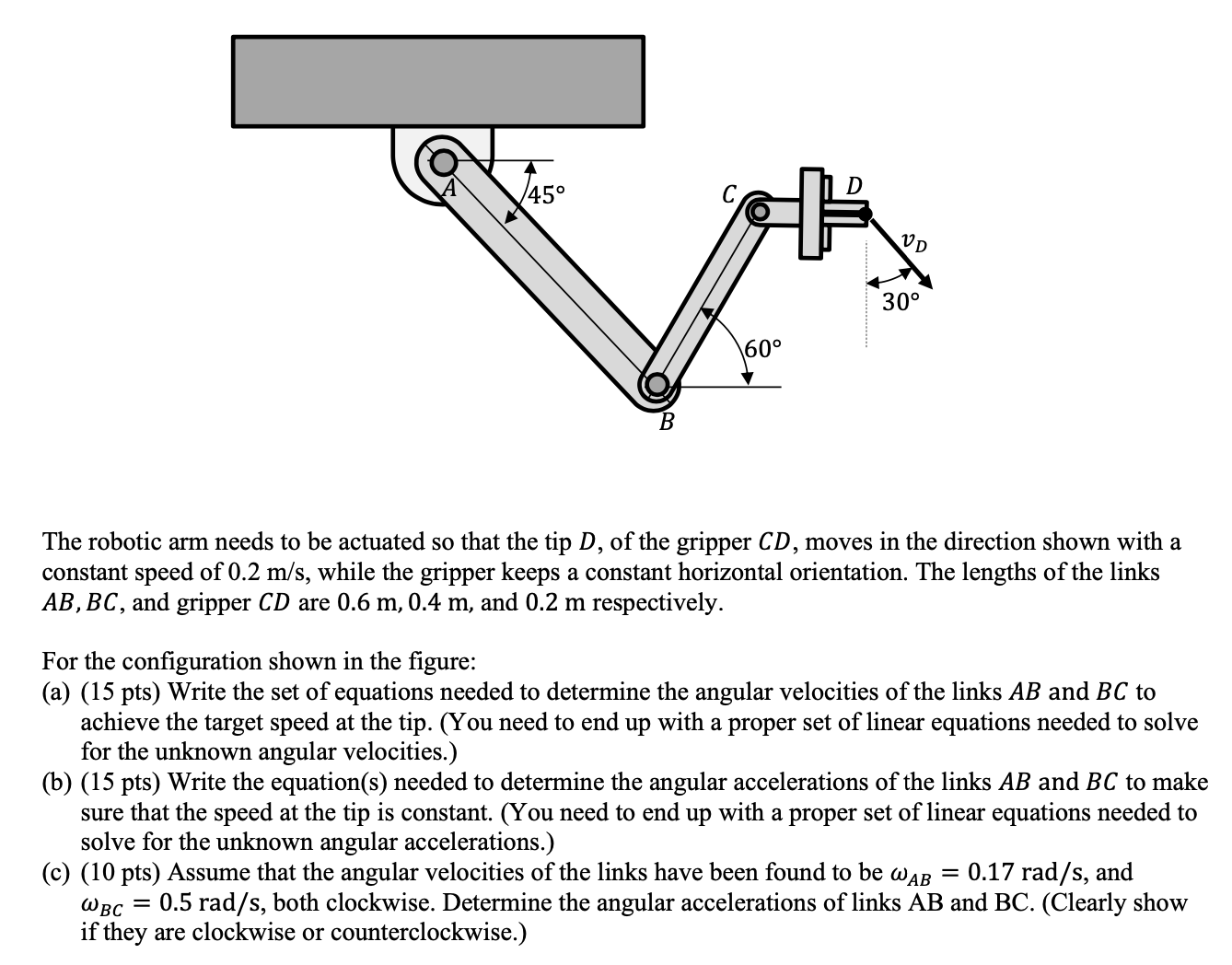
45 B VD 30 60 The robotic arm needs to be actuated so that the tip D, of the gripper CD, moves in the direction shown with a constant speed of 0.2 m/s, while the gripper keeps a constant horizontal orientation. The lengths of the links AB, BC, and gripper CD are 0.6 m, 0.4 m, and 0.2 m respectively. For the configuration shown in the figure: (a) (15 pts) Write the set of equations needed to determine the angular velocities of the links AB and BC to achieve the target speed at the tip. (You need to end up with a proper set of linear equations needed to solve for the unknown angular velocities.) (b) (15 pts) Write the equation(s) needed to determine the angular accelerations of the links AB and BC to make sure that the speed at the tip is constant. (You need to end up with a proper set of linear equations needed to solve for the unknown angular accelerations.) (c) (10 pts) Assume that the angular velocities of the links have been found to be WAB = 0.17 rad/s, and = WBC 0.5 rad/s, both clockwise. Determine the angular accelerations of links AB and BC. (Clearly show if they are clockwise or counterclockwise.)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts