

Question: 5. It is now desired to command test stand orientations using feedback control. Assume that we have a sensor that measures the test stand
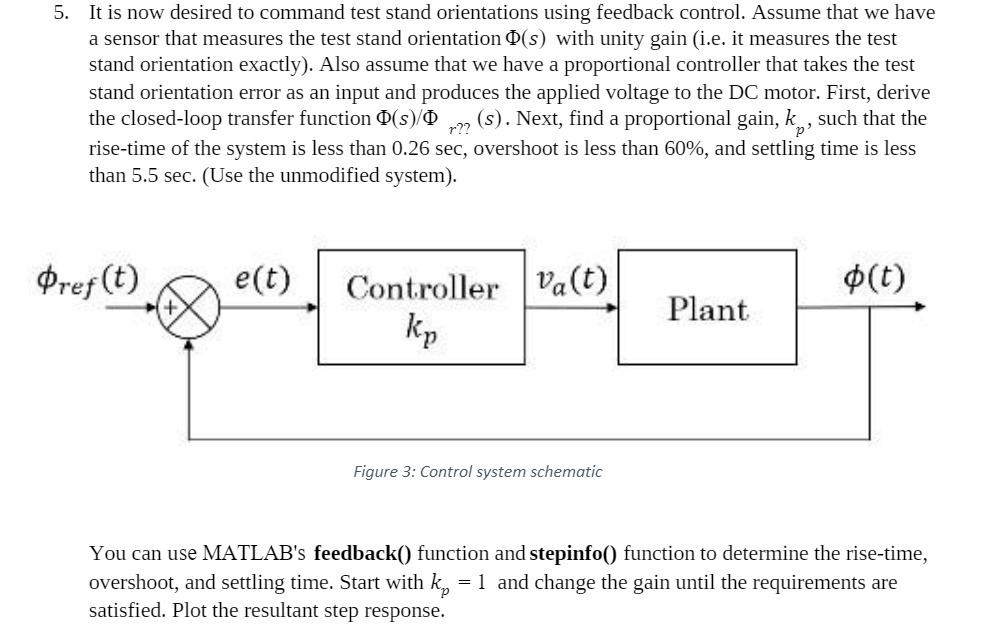
5. It is now desired to command test stand orientations using feedback control. Assume that we have a sensor that measures the test stand orientation (s) with unity gain (i.e. it measures the test stand orientation exactly). Also assume that we have a proportional controller that takes the test stand orientation error as an input and produces the applied voltage to the DC motor. First, derive the closed-loop transfer function (s)/ (s). Next, find a proportional gain, k, such that the rise-time of the system is less than 0.26 sec, overshoot is less than 60%, and settling time is less than 5.5 sec. (Use the unmodified system). r?? Pref (t) e(t) Controller kp va(t) (t) Plant Figure 3: Control system schematic You can use MATLAB's feedback() function and stepinfo() function to determine the rise-time, overshoot, and settling time. Start with k = 1 and change the gain until the requirements are satisfied. Plot the resultant step response.
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts