

Question: 6 Singularities: ( 3 D ) Robot In this problem you will explore singularities and manipulability of the planar robot shown above. You
Singularities: D Robot
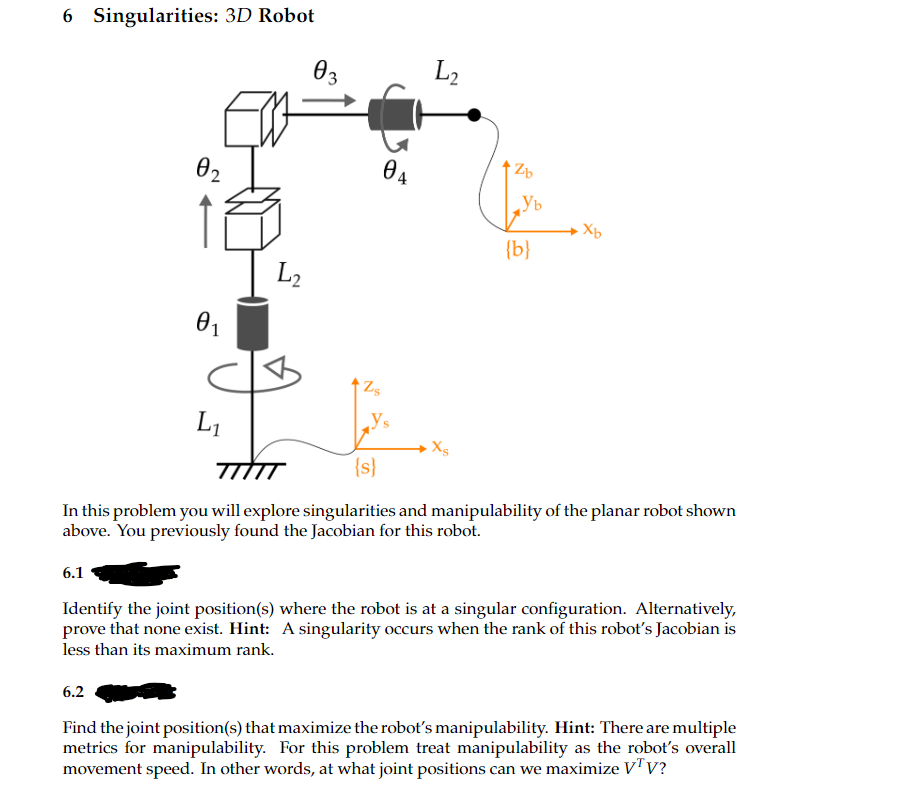
In this problem you will explore singularities and manipulability of the planar robot shown above. You previously found the Jacobian for this robot.
Identify the joint positions where the robot is at a singular configuration. Alternatively, prove that none exist. Hint: A singularity occurs when the rank of this robot's Jacobian is less than its maximum rank.
Find the joint positions that maximize the robot's manipulability. Hint: There are multiple metrics for manipulability. For this problem treat manipulability as the robot's overall movement speed. In other words, at what joint positions can we maximize VT V
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock