

Question: ( 7 marks in total ) The robot arm in Figure 7 is moved such that the position of grip A is given by r
marks in total
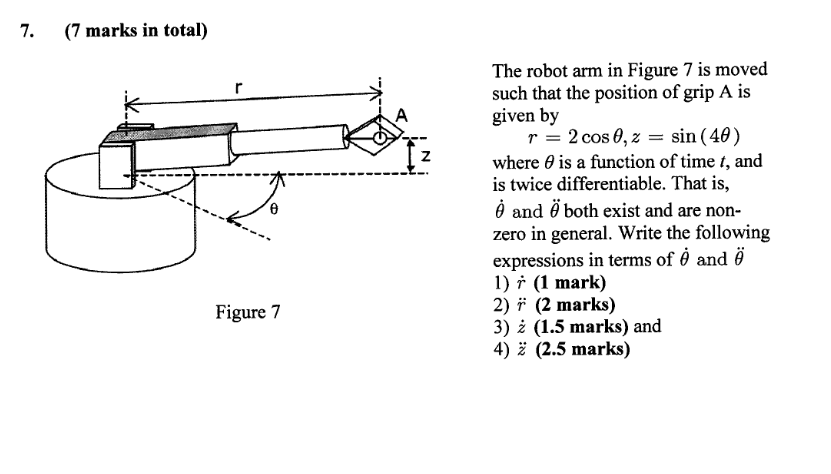
The robot arm in Figure is moved such that the position of grip is given by
where is a function of time and is twice differentiable. That is and both exist and are nonzero in general. Write the following expressions in terms of and
mark
marks
marks and
marks
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock