

Question: 8. Design the current, speed, and position feedback controllers (assuming a unity feedback) for de motor based on the small-signal analysis, in which the load
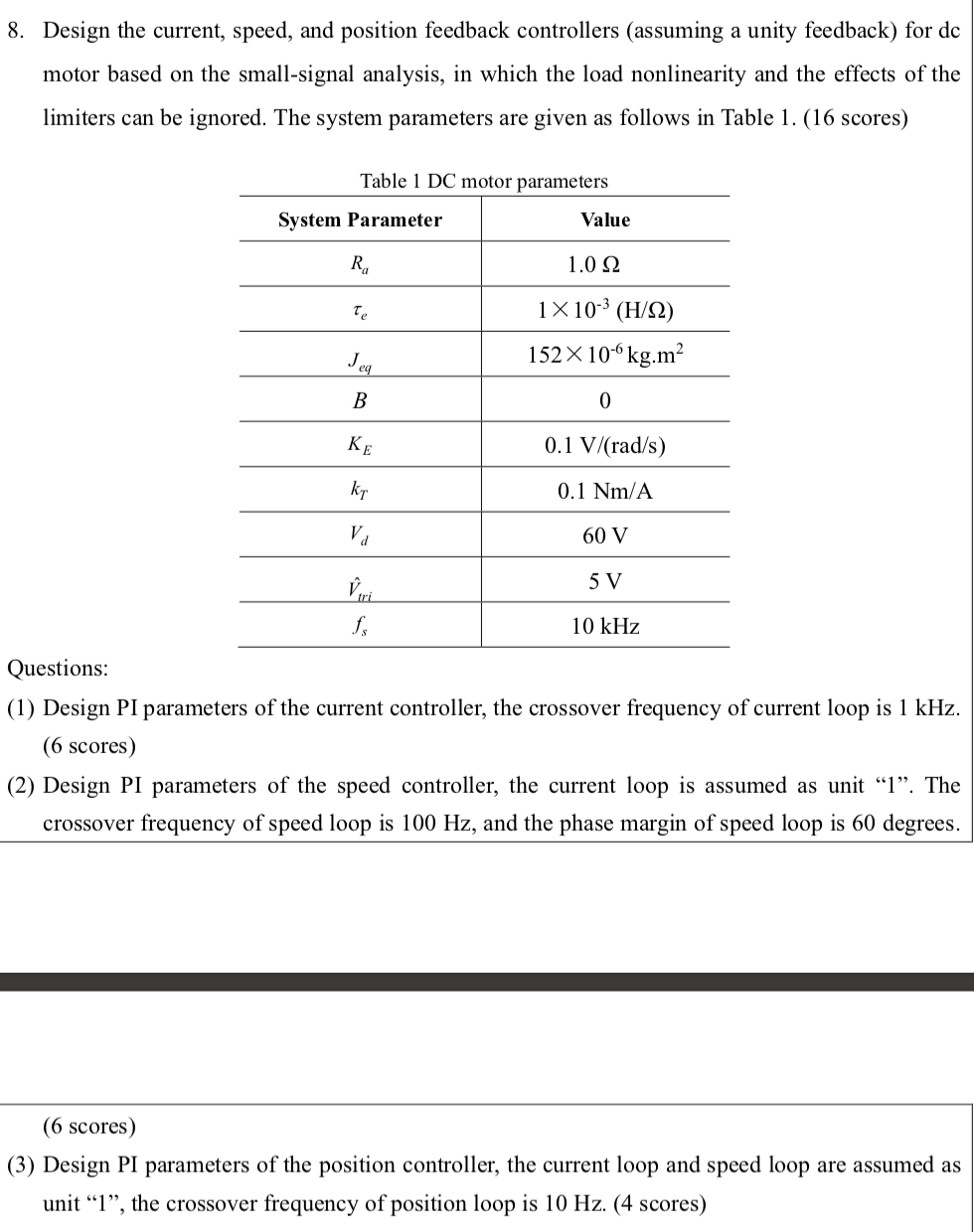
8. Design the current, speed, and position feedback controllers (assuming a unity feedback) for de motor based on the small-signal analysis, in which the load nonlinearity and the effects of the limiters can be ignored. The system parameters are given as follows in Table 1. (16 scores) Table 1 DC motor parameters System Parameter Value R, 1.022 Te 1x 10-3 (H/S2) 152 X 104 kg.m? Jeg B 0 KE 0.1 V/(rad/s) ki 0.1 Nm/A Va 60 V 5 V Veli f 10 kHz Questions: (1) Design PI parameters of the current controller, the crossover frequency of current loop is 1 kHz. (6 scores) (2) Design PI parameters of the speed controller, the current loop is assumed as unit 1. The crossover frequency of speed loop is 100 Hz, and the phase margin of speed loop is 60 degrees. (6 scores) (3) Design PI parameters of the position controller, the current loop and speed loop are assumed as unit 1, the crossover frequency of position loop is 10 Hz. (4 scores) 8. Design the current, speed, and position feedback controllers (assuming a unity feedback) for de motor based on the small-signal analysis, in which the load nonlinearity and the effects of the limiters can be ignored. The system parameters are given as follows in Table 1. (16 scores) Table 1 DC motor parameters System Parameter Value R, 1.022 Te 1x 10-3 (H/S2) 152 X 104 kg.m? Jeg B 0 KE 0.1 V/(rad/s) ki 0.1 Nm/A Va 60 V 5 V Veli f 10 kHz Questions: (1) Design PI parameters of the current controller, the crossover frequency of current loop is 1 kHz. (6 scores) (2) Design PI parameters of the speed controller, the current loop is assumed as unit 1. The crossover frequency of speed loop is 100 Hz, and the phase margin of speed loop is 60 degrees. (6 scores) (3) Design PI parameters of the position controller, the current loop and speed loop are assumed as unit 1, the crossover frequency of position loop is 10 Hz. (4 scores)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts