

Question: A differentially - steered robot has the following parameters: V = - 2 m s ; = 3 r a d s Radius o f
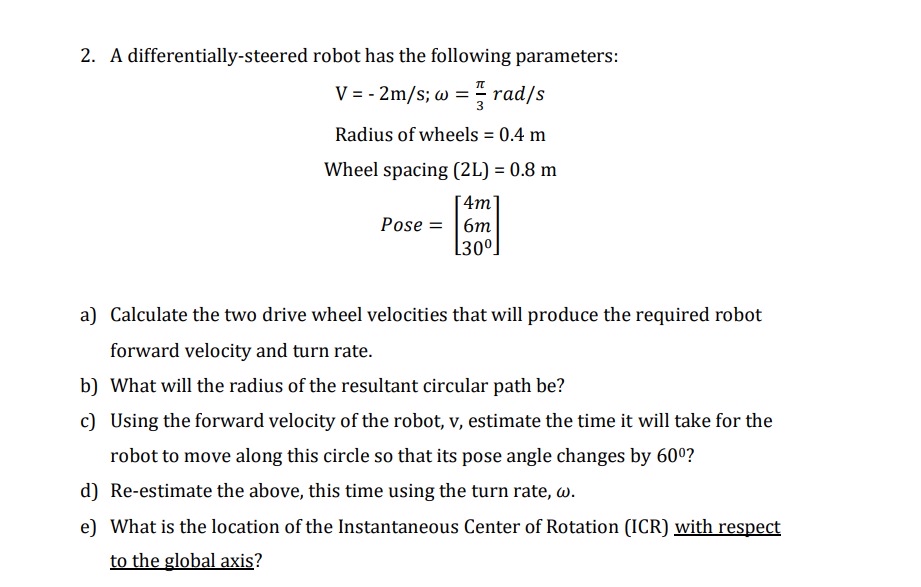
A differentiallysteered robot has the following parameters:
;
Radius wheels
Wheel spacing
Pose
a Calculate the two drive wheel velocities that will produce the required robot forward velocity and turn rate.
b What will the radius of the resultant circular path be
c Using the forward velocity of the robot, v estimate the time it will take for the robot to move along this circle so that its pose angle changes by
d Reestimate the above, this time using the turn rate,
e What is the location of the Instantaneous Center of Rotation ICR with respect to the global axis?
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock