

Question: (a) In the figure shown below, the three identical robot arms (that is, the linkages) are holding the flat cylindrical object. Each arm is
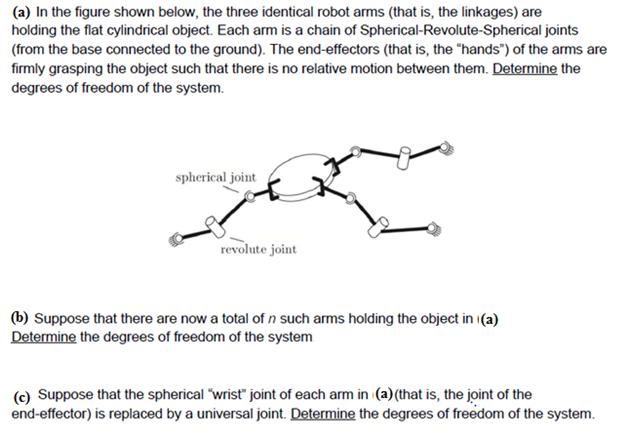
(a) In the figure shown below, the three identical robot arms (that is, the linkages) are holding the flat cylindrical object. Each arm is a chain of Spherical-Revolute-Spherical joints (from the base connected to the ground). The end-effectors (that is, the "hands") of the arms are firmly grasping the object such that there is no relative motion between them. Determine the degrees of freedom of the system. spherical joint revolute joint (b) Suppose that there are now a total of n such arms holding the object in (a) Determine the degrees of freedom of the system (c) Suppose that the spherical "wrist" joint of each arm in (a) (that is, the joint of the end-effector) is replaced by a universal joint. Determine the degrees of freedom of the system.
Step by Step Solution
There are 3 Steps involved in it
To solve this problem we need to determine the degrees of freedom DOF for the robotic systems descri... View full answer

Get step-by-step solutions from verified subject matter experts