

Question: A mobile robot using a vision system as the measurement device is shown in Figure 1 ( a ) . The block diagram for system
A mobile robot using a vision system as the measurement device is shown in Figure a The
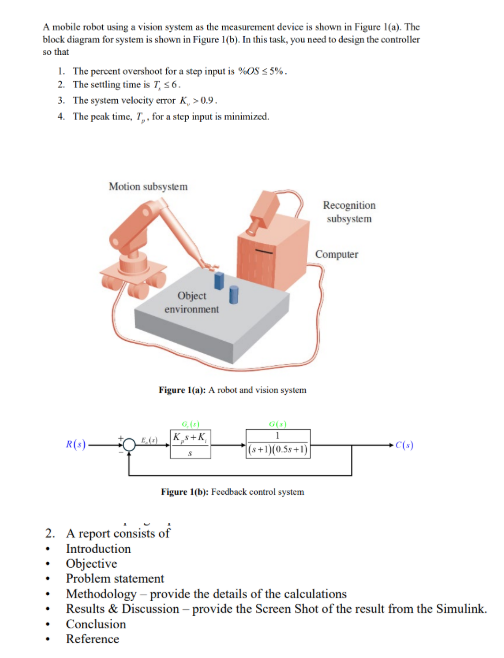
block diagram for system is shown in Figure b In this task, you need to design the controller
so that
The percent overshoot for a step input is OS
The settling time is Tn
The system velocity error Kv
The peak time, Tp for a step input is minimized.
Figure ifal: A robot and vistor syswem
please provide the
provide the details of the calculations?
provide the Screen Shot of the result from the Simulink.?
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock