

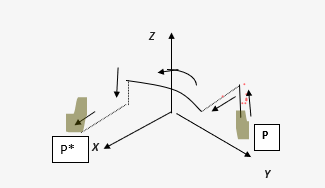
Question: A point in the robot gripper frame P [ 4 , 4 , 4 ] is subjected to following transformation. Find the coordinates of the
A point in the robot gripper frame P is subjected to following transformation. Find the coordinates of the new point P relative to the reference frame at the conclusion of transformation.
Step Translation of units along z axis followed by translation of units along Xaxis.
Step Rotation of degrees around Xaxis
Step Followed by translation of units along X axis.
Find the transformation matrix for the concatenated transformation and coordinates of the final position of the point?
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock