

Question: A robot is moving along a 20 m long corridor from the left to the right at a velocity of 1 m's (as illustrated in
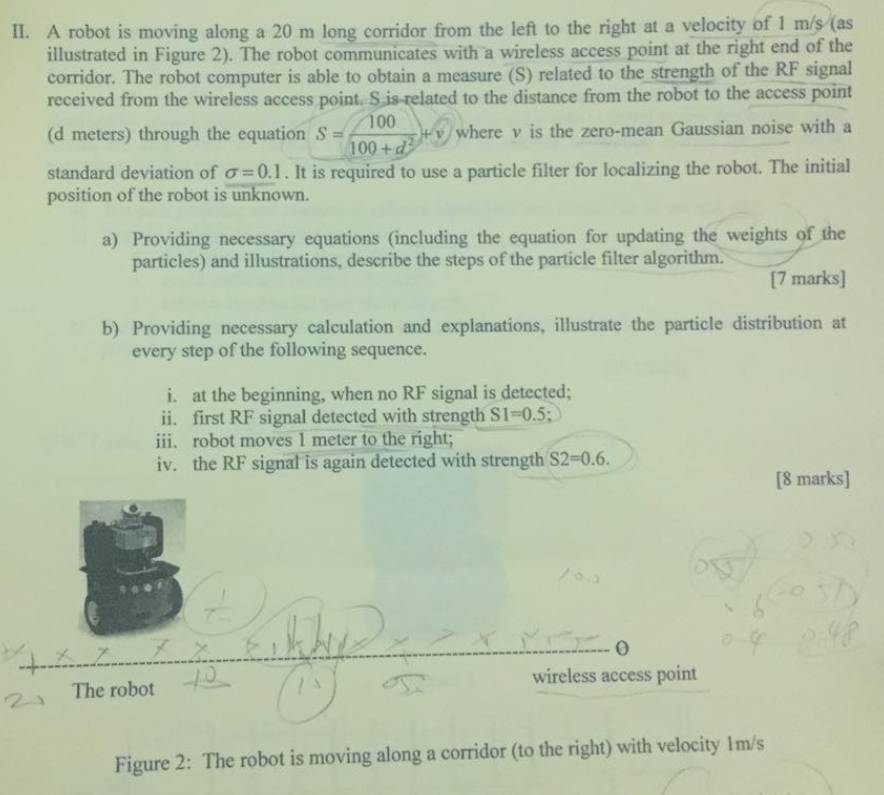
A robot is moving along a 20 m long corridor from the left to the right at a velocity of 1 m's (as illustrated in Figure 2). The robot communicates with a wireless access point at the right end of the corridor. The robot computer is able to obtain a measure (S) related to the strength of the RF signal received from the wireless access point. S is-related to the distance from the robot to the access point v/ where v is the zero-mean Gaussian noise with a IL. 100 100 + (d meters) through the equation S standard deviation of position of the robot is unknown. It is required to use a particle filter for localizing the robot. The initial 0.1 a) Providing necessary equations (including the equation for updating the weights of the [7 marks] b) Providing necessary calculation and explanations, illustrate the particle distribution at particles) and illustrations, describe the steps of the particle filter algorithm. every step of the following sequence. i. at the beginning, when no RF signal is detected; ii. first RF signal detected with strength S1-0.5: ii. robot moves I meter to the right; iv. the RF signal is again detected with strength S2-0.6. [8 marks) 0 wireless access point The robot Figure 2: The robot is moving along a corridor (to the right) with velocity Im/s A robot is moving along a 20 m long corridor from the left to the right at a velocity of 1 m's (as illustrated in Figure 2). The robot communicates with a wireless access point at the right end of the corridor. The robot computer is able to obtain a measure (S) related to the strength of the RF signal received from the wireless access point. S is-related to the distance from the robot to the access point v/ where v is the zero-mean Gaussian noise with a IL. 100 100 + (d meters) through the equation S standard deviation of position of the robot is unknown. It is required to use a particle filter for localizing the robot. The initial 0.1 a) Providing necessary equations (including the equation for updating the weights of the [7 marks] b) Providing necessary calculation and explanations, illustrate the particle distribution at particles) and illustrations, describe the steps of the particle filter algorithm. every step of the following sequence. i. at the beginning, when no RF signal is detected; ii. first RF signal detected with strength S1-0.5: ii. robot moves I meter to the right; iv. the RF signal is again detected with strength S2-0.6. [8 marks) 0 wireless access point The robot Figure 2: The robot is moving along a corridor (to the right) with velocity Im/s
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts