

Question: A simple two dimensional robot localisation problem using bearing information can be formulated as an optimisation problem. Suppose a mobile robot is navigating in an
A simple two dimensional robot localisation problem using bearing information can be formulated as an optimisation
problem.
Suppose a mobile robot is navigating in an environment and it observes landmarks. The xy positions of the landmarks
are known. The robot can only observe the bearings to the landmarks. The bearing means the direction of the landmark
with respect to the heading of the robot. The problem is to estimate the robot position and orientation using the bearings
and the landmark positions.
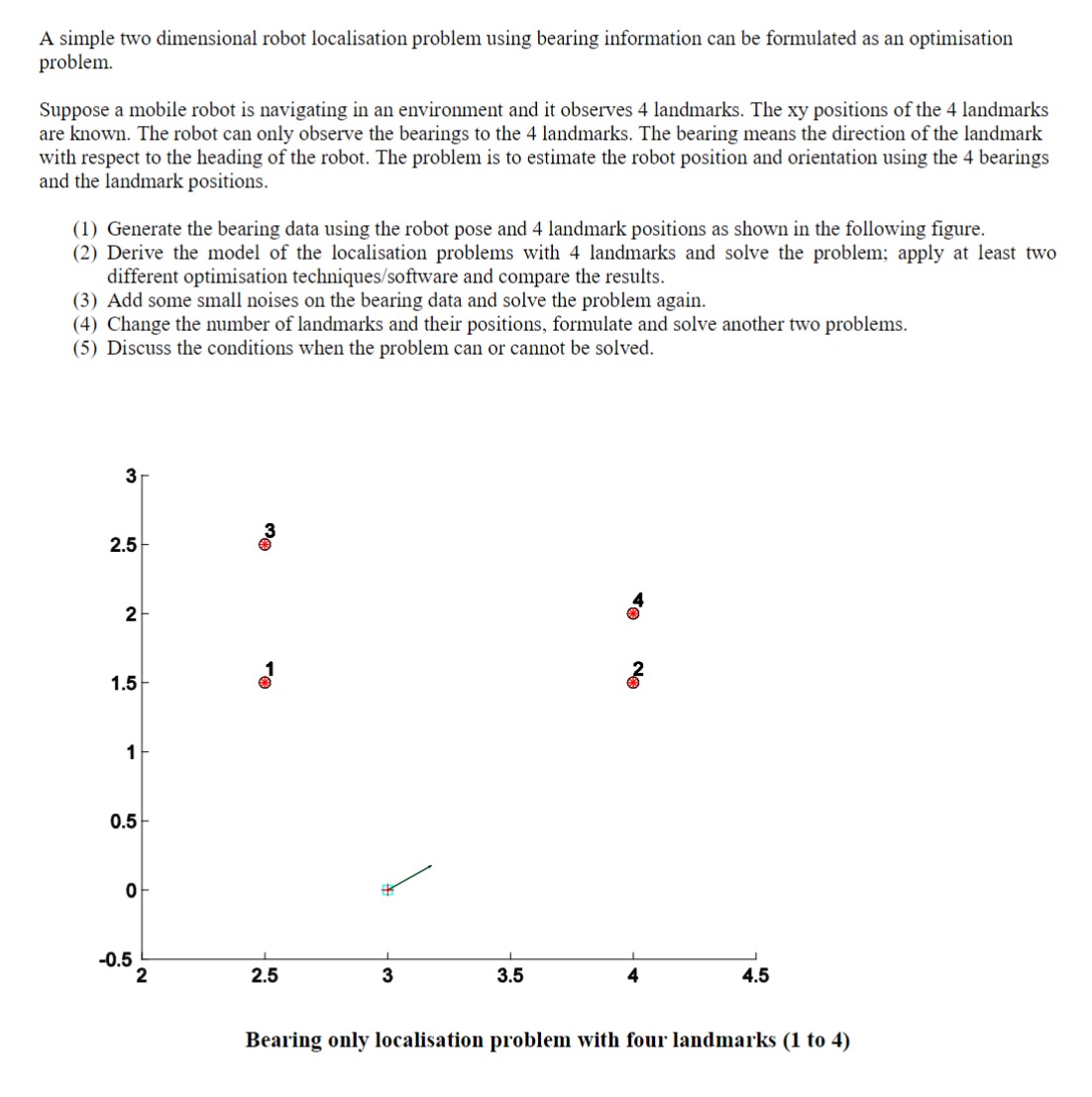
Generate the bearing data using the robot pose and landmark positions as shown in the following figure.
Derive the model of the localisation problems with landmarks and solve the problem; apply at least two
different optimisation techniquessoftware and compare the results.
Add some small noises on the bearing data and solve the problem again.
Change the number of landmarks and their positions, formulate and solve another two problems.
Discuss the conditions when the problem can or cannot be solved.
Bearing only localisation problem with four landmarks to
I NEED A DETAILED SOLUTIONS WITH MATLAB CODE OR EXCEL SOLVER OR ANY OTHER REQUIRED SOLUTION METHOD
JUST PROVIDE ME DETAILED SOLUTION
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock