

Question: QUESTION 2 A two dimensional robot has the transformations between links of the robot are follows: 00 C2 -82 04 S C 00 $2
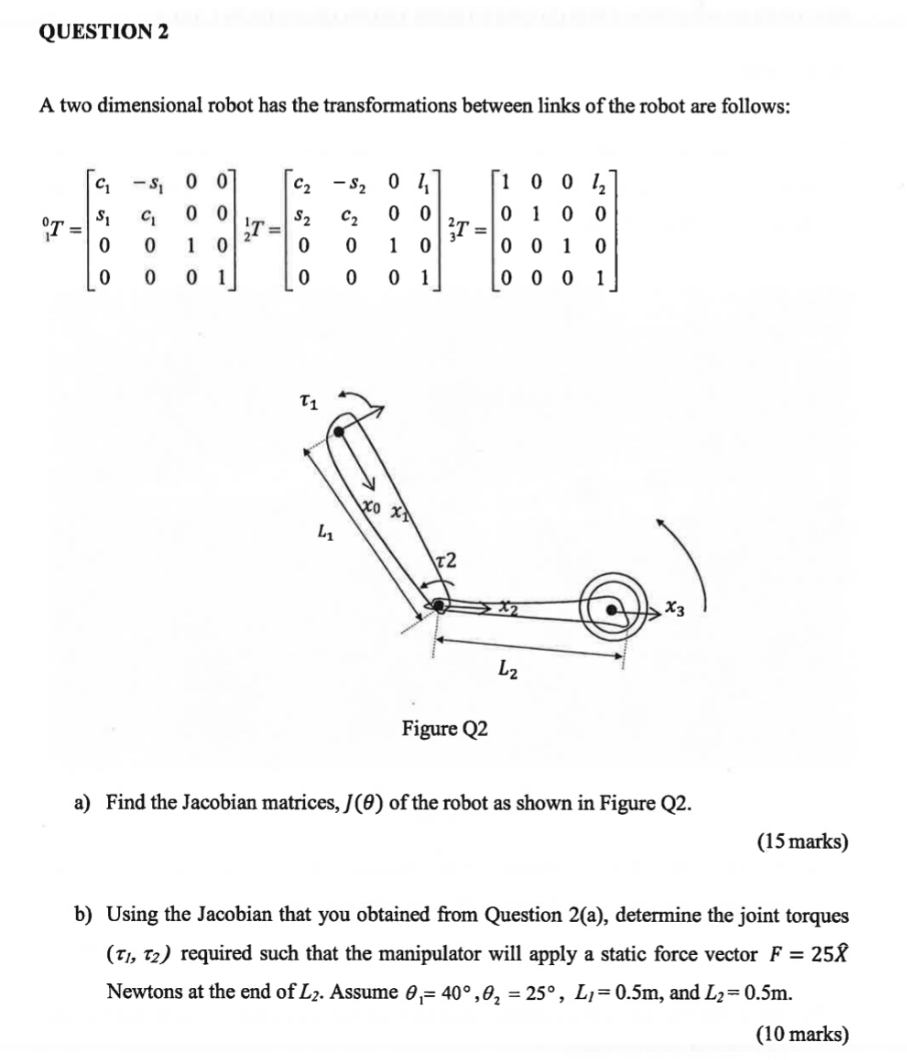
QUESTION 2 A two dimensional robot has the transformations between links of the robot are follows: 00 C2 -82 04 S C 00 $2 C2 0 0 T = T = T = 0 0 1 0 0 0 10 0 0 01 0 0 01 L [100 2] 0100 001 0 0001 Figure Q2 L2 x3 a) Find the Jacobian matrices, J(8) of the robot as shown in Figure Q2. (15 marks) b) Using the Jacobian that you obtained from Question 2(a), determine the joint torques (T1, T2) required such that the manipulator will apply a static force vector F = 25 Newtons at the end of L2. Assume 0 = 40,0 = 25, L = 0.5m, and L2=0.5m. (10 marks)
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock