

A tricycle like mobile robot is shown in Figure 1. There are usually two different types...
Fantastic news! We've Found the answer you've been seeking!
Question:
Transcribed Image Text:
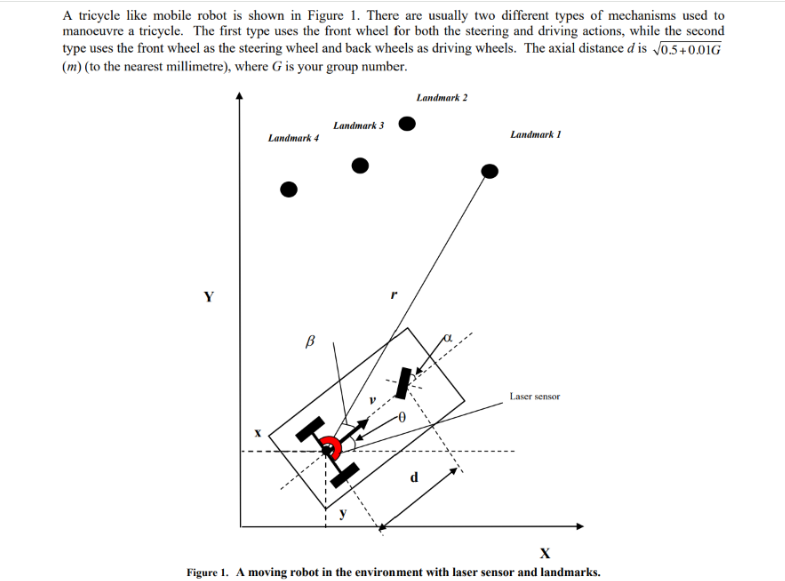
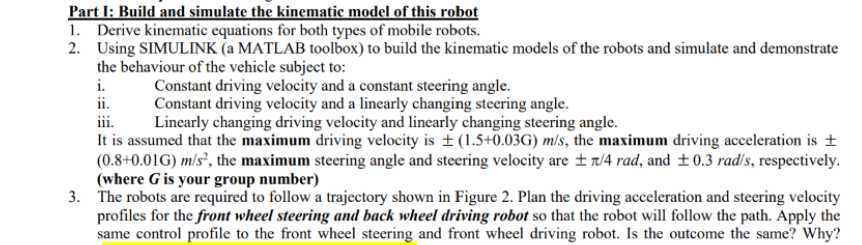
A tricycle like mobile robot is shown in Figure 1. There are usually two different types of mechanisms used to manoeuvre a tricycle. The first type uses the front wheel for both the steering and driving actions, while the second type uses the front wheel as the steering wheel and back wheels as driving wheels. The axial distance d is √0.5 +0.01G (m) (to the nearest millimetre), where G is your group number. Landmark 4 Landmark 3 Landmark 2 d Landmark 1 Laser sensor X Figure 1. A moving robot in the environment with laser sensor and landmarks. Part I: Build and simulate the kinematic model of this robot 1. Derive kinematic equations for both types of mobile robots. 2. Using SIMULINK (a MATLAB toolbox) to build the kinematic models of the robots and simulate and demonstrate the behaviour of the vehicle subject to: i. Constant driving velocity and a constant steering angle. ii. Constant driving velocity and a linearly changing steering angle. iii. Linearly changing driving velocity and linearly changing steering angle. It is assumed that the maximum driving velocity is ± (1.5+0.03G) m/s, the maximum driving acceleration is ± (0.8+0.01G) m/s², the maximum steering angle and steering velocity are ±1/4 rad, and ±0.3 rad/s, respectively. (where G is your group number) 3. The robots are required to follow a trajectory shown in Figure 2. Plan the driving acceleration and steering velocity profiles for the front wheel steering and back wheel driving robot so that the robot will follow the path. Apply the same control profile to the front wheel steering and front wheel driving robot. Is the outcome the same? Why? A tricycle like mobile robot is shown in Figure 1. There are usually two different types of mechanisms used to manoeuvre a tricycle. The first type uses the front wheel for both the steering and driving actions, while the second type uses the front wheel as the steering wheel and back wheels as driving wheels. The axial distance d is √0.5+0.01G (m) (to the nearest millimetre), where G is your group number. Landmark 4 Landmark 3 Landmark 2 d Landmark 1 Laser sensor X Figure 1. A moving robot in the environment with laser sensor and landmarks. Part I: Build and simulate the kinematic model of this robot 1. Derive kinematic equations for both types of mobile robots. 2. Using SIMULINK (a MATLAB toolbox) to build the kinematic models of the robots and simulate and demonstrate the behaviour of the vehicle subject to: i. Constant driving velocity and a constant steering angle. ii. Constant driving velocity and a linearly changing steering angle. iii. Linearly changing driving velocity and linearly changing steering angle. It is assumed that the maximum driving velocity is ±(1.5+0.03G) m/s, the maximum driving acceleration is ± (0.8+0.01G) m/s², the maximum steering angle and steering velocity are ±1/4 rad, and ±0.3 rad/s, respectively. (where G is your group number) 3. The robots are required to follow a trajectory shown in Figure 2. Plan the driving acceleration and steering velocity profiles for the front wheel steering and back wheel driving robot so that the robot will follow the path. Apply the same control profile to the front wheel steering and front wheel driving robot. Is the outcome the same? Why? A tricycle like mobile robot is shown in Figure 1. There are usually two different types of mechanisms used to manoeuvre a tricycle. The first type uses the front wheel for both the steering and driving actions, while the second type uses the front wheel as the steering wheel and back wheels as driving wheels. The axial distance d is √0.5 +0.01G (m) (to the nearest millimetre), where G is your group number. Landmark 4 Landmark 3 Landmark 2 d Landmark 1 Laser sensor X Figure 1. A moving robot in the environment with laser sensor and landmarks. Part I: Build and simulate the kinematic model of this robot 1. Derive kinematic equations for both types of mobile robots. 2. Using SIMULINK (a MATLAB toolbox) to build the kinematic models of the robots and simulate and demonstrate the behaviour of the vehicle subject to: i. Constant driving velocity and a constant steering angle. ii. Constant driving velocity and a linearly changing steering angle. iii. Linearly changing driving velocity and linearly changing steering angle. It is assumed that the maximum driving velocity is ± (1.5+0.03G) m/s, the maximum driving acceleration is ± (0.8+0.01G) m/s², the maximum steering angle and steering velocity are ±1/4 rad, and ±0.3 rad/s, respectively. (where G is your group number) 3. The robots are required to follow a trajectory shown in Figure 2. Plan the driving acceleration and steering velocity profiles for the front wheel steering and back wheel driving robot so that the robot will follow the path. Apply the same control profile to the front wheel steering and front wheel driving robot. Is the outcome the same? Why? A tricycle like mobile robot is shown in Figure 1. There are usually two different types of mechanisms used to manoeuvre a tricycle. The first type uses the front wheel for both the steering and driving actions, while the second type uses the front wheel as the steering wheel and back wheels as driving wheels. The axial distance d is √0.5+0.01G (m) (to the nearest millimetre), where G is your group number. Landmark 4 Landmark 3 Landmark 2 d Landmark 1 Laser sensor X Figure 1. A moving robot in the environment with laser sensor and landmarks. Part I: Build and simulate the kinematic model of this robot 1. Derive kinematic equations for both types of mobile robots. 2. Using SIMULINK (a MATLAB toolbox) to build the kinematic models of the robots and simulate and demonstrate the behaviour of the vehicle subject to: i. Constant driving velocity and a constant steering angle. ii. Constant driving velocity and a linearly changing steering angle. iii. Linearly changing driving velocity and linearly changing steering angle. It is assumed that the maximum driving velocity is ±(1.5+0.03G) m/s, the maximum driving acceleration is ± (0.8+0.01G) m/s², the maximum steering angle and steering velocity are ±1/4 rad, and ±0.3 rad/s, respectively. (where G is your group number) 3. The robots are required to follow a trajectory shown in Figure 2. Plan the driving acceleration and steering velocity profiles for the front wheel steering and back wheel driving robot so that the robot will follow the path. Apply the same control profile to the front wheel steering and front wheel driving robot. Is the outcome the same? Why?
Expert Answer:

Related Book For 
Posted Date:
Students also viewed these databases questions
-
a. Example 13-1: Batch Reactor with an Exothermic Reaction Wolfram 1. Adiabatic Case: Use Wolfram to see whether you can find a trajectory that is ready to ignite and whose trajectory looks like a...
-
Planning is one of the most important management functions in any business. A front office managers first step in planning should involve determine the departments goals. Planning also includes...
-
In an experiment that is designed to measure the Earths magnetic field using the Hall effect a copper bar 0.500 cm thick is positioned along an eastwest direction. If a current of 8.00 A in the...
-
The following data are taken from the balance of payments of Freedonia (currency FDK): Is the following statement consistent with the data shown above? "After 1995, foreigners have issued...
-
The decomposition of salicylic acid to phenol and carbon dioxide was carried out at 200.0 C, a temperature at which the reactant and products are all gaseous. A 0.300 g sample of salicylic acid was...
-
A supplier of imported vernier calipers claims that \(90 \%\) of their instruments have a precision of 0.999. Testing the null hypothesis \(p=0.90\) against the alternative hypothesis \(p eq 0.90\),...
-
Dell Inc., headquartered in Austin, Texas, is the global leader in selling computer products and services. The following is Dells (simplified) balance sheet from a recent year. DELL INC. Balance...
-
Trisha is head of a team of three accountants at a non-profit agency that strives to promote literacy among inner city teenagers who drop out of high school. Trisha has held this position for over...
-
After watching the Belgian / French film "Fear and Trembling" - [rental link - Rental link to the Belgian / Japanese film Prompt 1: Imagine that you took over Amelie's position in that company after...
-
Discuss the best time and the right mood for productive writing. Describe a work situation where an email is more appropriate than a text message. Write a paragraph transition sentence using the...
-
a. Equipment depreciation was $1,500. b. $700 of advertising expense was incurred but not paid. (Use Advertising Payable.) c. Office Supplies on hand at the end of the year totaled $250. The...
-
Is Google a monopoly? Why or why not? Research this issue.
-
If a comet nucleus partly vaporizes and loses material into the comet's head & tail each time its passes near the Sun, what eventually happens to the nucleus?
-
The velocity of sound is about 344 meters per second. What is the expected frequency of a recorder that is 44 cm long with all holes covered
-
Consider the rate of return of stocks ABC and XYZ . Year rABC rXYZ 1 2 3 % 3 8 % 2 8 1 2 3 1 7 1 8 4 5 1 5 3 1 3 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ c ....
-
7 years ago Alfa-Bank invested $1,000,000 at a 5 percent annual interest rate. If the bank invests an additional $20,000 a year for 15 years, at the beginning of each year, at a 5 percent annual...
-
A liquid flows upward through a valve situated in a vertical pipe. Calculate the differential pressure (kPa) between points A and B. The mean velocity of the flow is 4.1 m/s. The specific gravity of...
-
The irreversible first-order (wrt partial pressure of A) gas-phase reaction A B is carried out isothermally in a fluidized catalytic CSTR containing 50 kg of catalyst. Currently, 50% conversion is...
-
Derive an equation for the time necessary to completely burn a 100 m carbon particle as a function of D 0 . Also calculate the burning rate constant. Use the KS values of the parameter values, for...
-
The liquid-phase reaction in Problems P11-4A and P12-7A is to be carried out in a semibatch reactor. There are 500 mol of A initially in the reactor at 25C. Species B is fed to the reactor at 50C and...
-
The 10-Q filing with the Securities and Exchange Commission is produced by the company's: A. management. B. beneficial owners. C. independent accountant.
-
The accounting standards that are used in many non-U.S. countries are the: A. Financial Accounting Standards. B. International Financial Standards. C. International Financial Reporting Standards.
-
Off-balance sheet financing is a concern because: A. It is illegal. B. It is recorded at book value instead of market value. C. There is debt that is not fully reported in the financial statements.

Study smarter with the SolutionInn App