

Question: a. Using the time differentiation method find the velocity (linear and angular) of the end effector in the base frame, i.e. find vs &
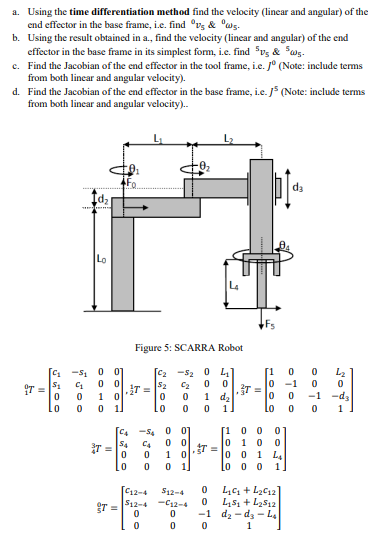
a. Using the time differentiation method find the velocity (linear and angular) of the end effector in the base frame, i.e. find vs & ws. b. Using the result obtained in a., find the velocity (linear and angular) of the end effector in the base frame in its simplest form, i.e. find 5v5 & 505. c. Find the Jacobian of the end effector in the tool frame, i.e. J (Note: include terms from both linear and angular velocity). d. Find the Jacobian of the end effector in the base frame, i.e. J5 (Note: include terms from both linear and angular velocity).. IT = [C-S 0 01 00 10 $ C 0 0 Lo Lo 0 0 11 = T = C4 S4 0 0 Figure 5: SCARRA Robot C2 - 0 L $ 0 0 0 .0 T = -S4 C4 0 0 0 0 $12-4 0 0 001 00 10 0 1 L 1 d 0 1 T = [C2-4 $12-4 0 -C12-4 0 0 0 2T = [1 10 0 Lo [1 0 0 0 0 1 0 0 0 0 1 L Lo 00 1. 44 +412] LS1 +42$12 -1 dd3-L4 0 1 da 0 0 0 0 -1 0 0 -1 L 0 -d3 1
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts