

Question: An object moves horizontally, in r-direction, as shown in Figure 2. The position, velocity and acceleration of the object at time step k is denoted
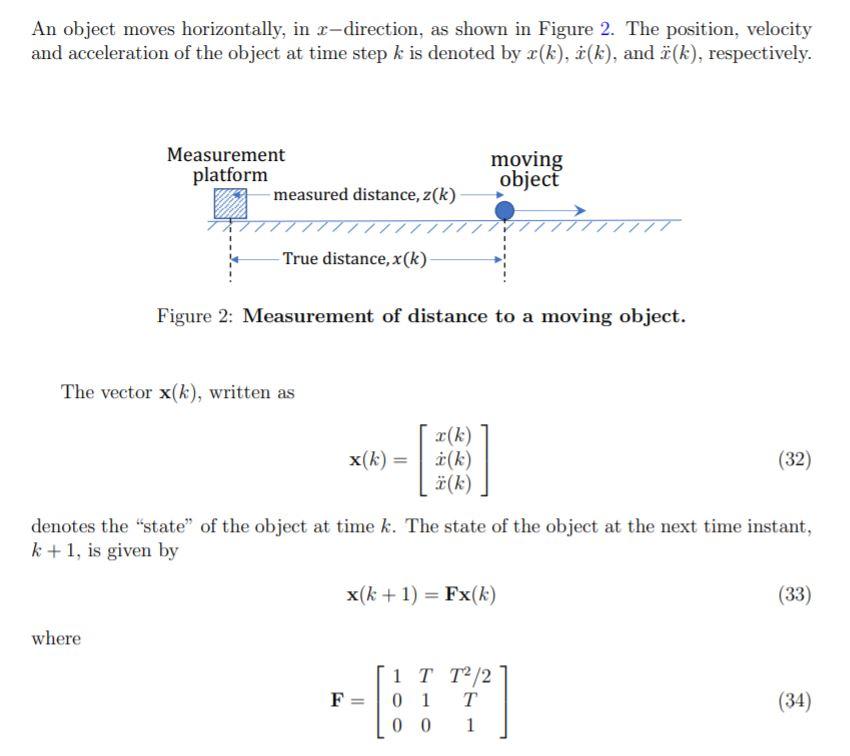

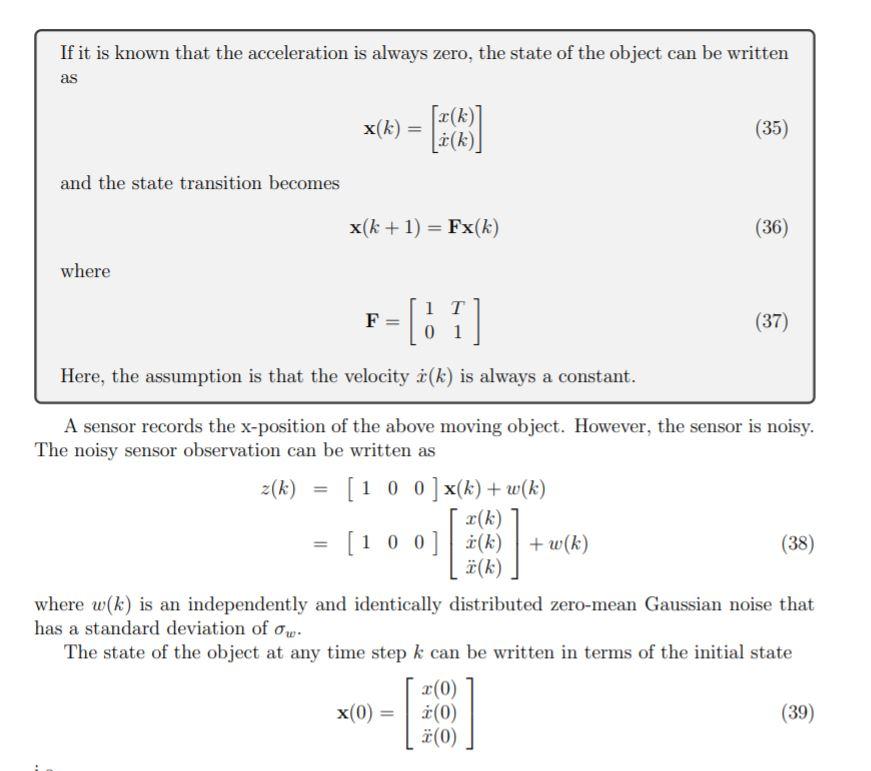
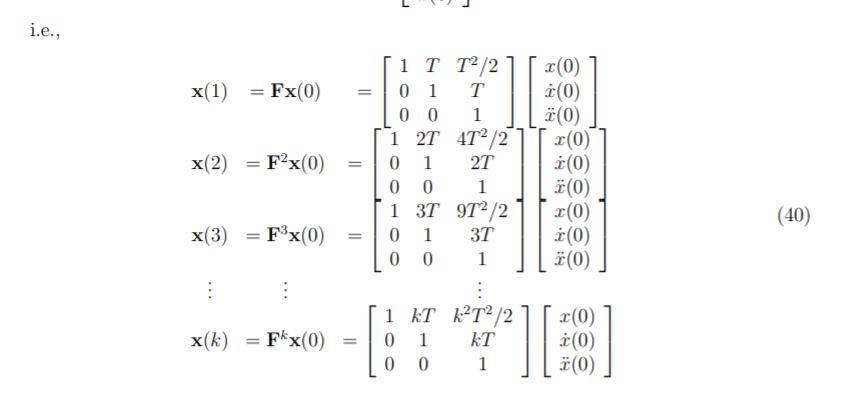

An object moves horizontally, in r-direction, as shown in Figure 2. The position, velocity and acceleration of the object at time step k is denoted by r(k), 3(k), and (k), respectively. Measurement platform measured distance, z(k) moving object True distance, x(k) Figure 2: Measurement of distance to a moving object. The vector x(k), written as (k) x(k) (32) (k) denotes the "state" of the object at time k. The state of the object at the next time instant, k+1, is given by x(k+1) = Fx(k) ) ) (33) where F= 1 T T2/2 0 1 T 0 0 1 (34) and it is assumed that the duration between the kth and (k+1)th time interval is a constant T seconds. It must be noted that (33) is true under the assumption that the acceleration (k) is always constant. If it is known that the acceleration is always zero, the state of the object can be written as x(k) = [x(k)] [.i(k) (35) and the state transition becomes x(k+1) = Fx(k) (36) where F= [8] 1 T 0 1 (37) Here, the assumption is that the velocity i(k) is always a constant. A sensor records the x-position of the above moving object. However, the sensor is noisy. The noisy sensor observation can be written as z(k) [1 0 0 ] x(k) +w(k) 2(k) [100] (k) + wk) (38) ] where w(k) is an independently and identically distributed zero-mean Gaussian noise that has a standard deviation of ow. The state of the object at any time step k can be written in terms of the initial state x(0) x(0) = (0) (39) 3(0) 7 i.e., x(1) = Fx(0) x(2) = Fx(0) 1 T T2/2 0 1 T 0 0 1 1 2T 4T2/2 0 1 2T 0 0 1 1 3T 9T2/2 0 1 3T 0 0 1 (0 (0) (0) 20 (0) C(0) (0) -(0) *(0) (40) x(3) Fx(0) : : x(k) Fx(0) 1 KT kT2/2 0 1 KT 0 0 1 "] 2(0) . (0) 30 Correspondingly, the measurement equation can be simplified as z(3) .. Z" 2(1) 100 x(1) + w(1) 1 T T2/2 ) x(0) + w(1) z(2) = 100 x(2) + (2) = 1 2T 4TP/2 x(0) + w(2) 100 x(3) + w(3) 1 3T 9T2/2 x(0) + w(3) (41) . : z(k) = [1 0 0 ] x(k) + w(k) = [1 kt kT/2 ] x(0) + w(k) Considering a batch of n measurements, the above observation model can be written as z" = Hx(0) + w" (42) where [z(1) 2 (2) 2(3) ... z(n)]* ( 1 T T2/2 1 2T 4T22 H" 1 3T 9T/2 (43) : . 1 nT nT/2 [v(1) v(2) v(3) ... v(n)] (44) where it is easy to see that E [(w")(w")"] = 01, (45) Question 3.1 (Batch LS estimation). Assume the following T = 1/64 and the measurement noise s.d. o=1. (a) Write a program to simulate the data according to the observation model (38) (simulate k= 1, 2, ... 100 measurements) (a) Use the LS method to estimate the initial state of the object XL(0) (using all 100 measurements) (b) Plot the estimated state of the object (position, velocity and acceleration) at step k, k = 1,...,100; when appropriate, plot the ground truth and the measurement on the same plot. w" An object moves horizontally, in r-direction, as shown in Figure 2. The position, velocity and acceleration of the object at time step k is denoted by r(k), 3(k), and (k), respectively. Measurement platform measured distance, z(k) moving object True distance, x(k) Figure 2: Measurement of distance to a moving object. The vector x(k), written as (k) x(k) (32) (k) denotes the "state" of the object at time k. The state of the object at the next time instant, k+1, is given by x(k+1) = Fx(k) ) ) (33) where F= 1 T T2/2 0 1 T 0 0 1 (34) and it is assumed that the duration between the kth and (k+1)th time interval is a constant T seconds. It must be noted that (33) is true under the assumption that the acceleration (k) is always constant. If it is known that the acceleration is always zero, the state of the object can be written as x(k) = [x(k)] [.i(k) (35) and the state transition becomes x(k+1) = Fx(k) (36) where F= [8] 1 T 0 1 (37) Here, the assumption is that the velocity i(k) is always a constant. A sensor records the x-position of the above moving object. However, the sensor is noisy. The noisy sensor observation can be written as z(k) [1 0 0 ] x(k) +w(k) 2(k) [100] (k) + wk) (38) ] where w(k) is an independently and identically distributed zero-mean Gaussian noise that has a standard deviation of ow. The state of the object at any time step k can be written in terms of the initial state x(0) x(0) = (0) (39) 3(0) 7 i.e., x(1) = Fx(0) x(2) = Fx(0) 1 T T2/2 0 1 T 0 0 1 1 2T 4T2/2 0 1 2T 0 0 1 1 3T 9T2/2 0 1 3T 0 0 1 (0 (0) (0) 20 (0) C(0) (0) -(0) *(0) (40) x(3) Fx(0) : : x(k) Fx(0) 1 KT kT2/2 0 1 KT 0 0 1 "] 2(0) . (0) 30 Correspondingly, the measurement equation can be simplified as z(3) .. Z" 2(1) 100 x(1) + w(1) 1 T T2/2 ) x(0) + w(1) z(2) = 100 x(2) + (2) = 1 2T 4TP/2 x(0) + w(2) 100 x(3) + w(3) 1 3T 9T2/2 x(0) + w(3) (41) . : z(k) = [1 0 0 ] x(k) + w(k) = [1 kt kT/2 ] x(0) + w(k) Considering a batch of n measurements, the above observation model can be written as z" = Hx(0) + w" (42) where [z(1) 2 (2) 2(3) ... z(n)]* ( 1 T T2/2 1 2T 4T22 H" 1 3T 9T/2 (43) : . 1 nT nT/2 [v(1) v(2) v(3) ... v(n)] (44) where it is easy to see that E [(w")(w")"] = 01, (45) Question 3.1 (Batch LS estimation). Assume the following T = 1/64 and the measurement noise s.d. o=1. (a) Write a program to simulate the data according to the observation model (38) (simulate k= 1, 2, ... 100 measurements) (a) Use the LS method to estimate the initial state of the object XL(0) (using all 100 measurements) (b) Plot the estimated state of the object (position, velocity and acceleration) at step k, k = 1,...,100; when appropriate, plot the ground truth and the measurement on the same plot. w
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts