

Question: ANSWER FULLY AND COMPLETELY, WITH YOUR OWN WORK ( DO NOT COPY ANOTHER CHEGG RESPONSE ) The robot shown in Figure 2 has the differential
ANSWER FULLY AND COMPLETELY, WITH YOUR OWN WORK DO NOT COPY ANOTHER CHEGG RESPONSE
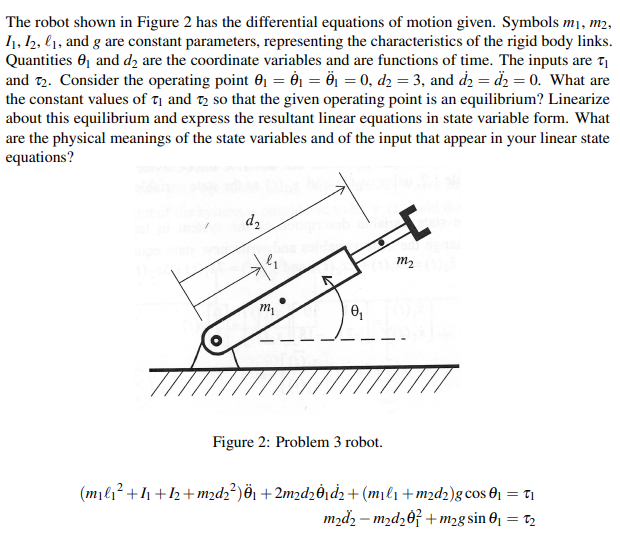
The robot shown in Figure has the differential equations of motion given. Symbols
and are constant parameters, representing the characteristics of the rigid body links.
Quantities and are the coordinate variables and are functions of time. The inputs are
and Consider the operating point and What are
the constant values of and so that the given operating point is an equilibrium? Linearize
about this equilibrium and express the resultant linear equations in state variable form. What
are the physical meanings of the state variables and of the input that appear in your linear state
equations?
Figure : Problem robot.
gsin
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock