

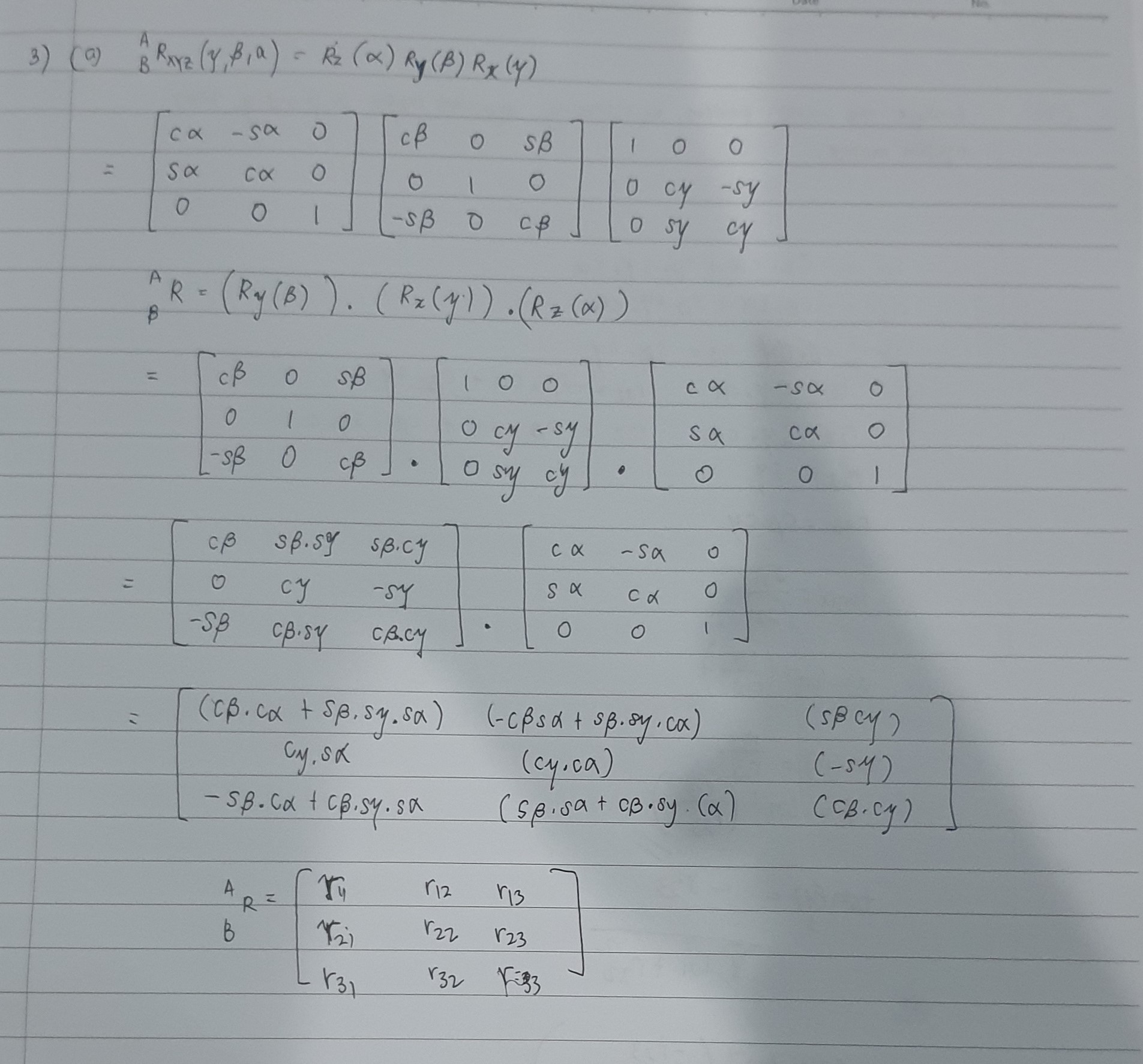
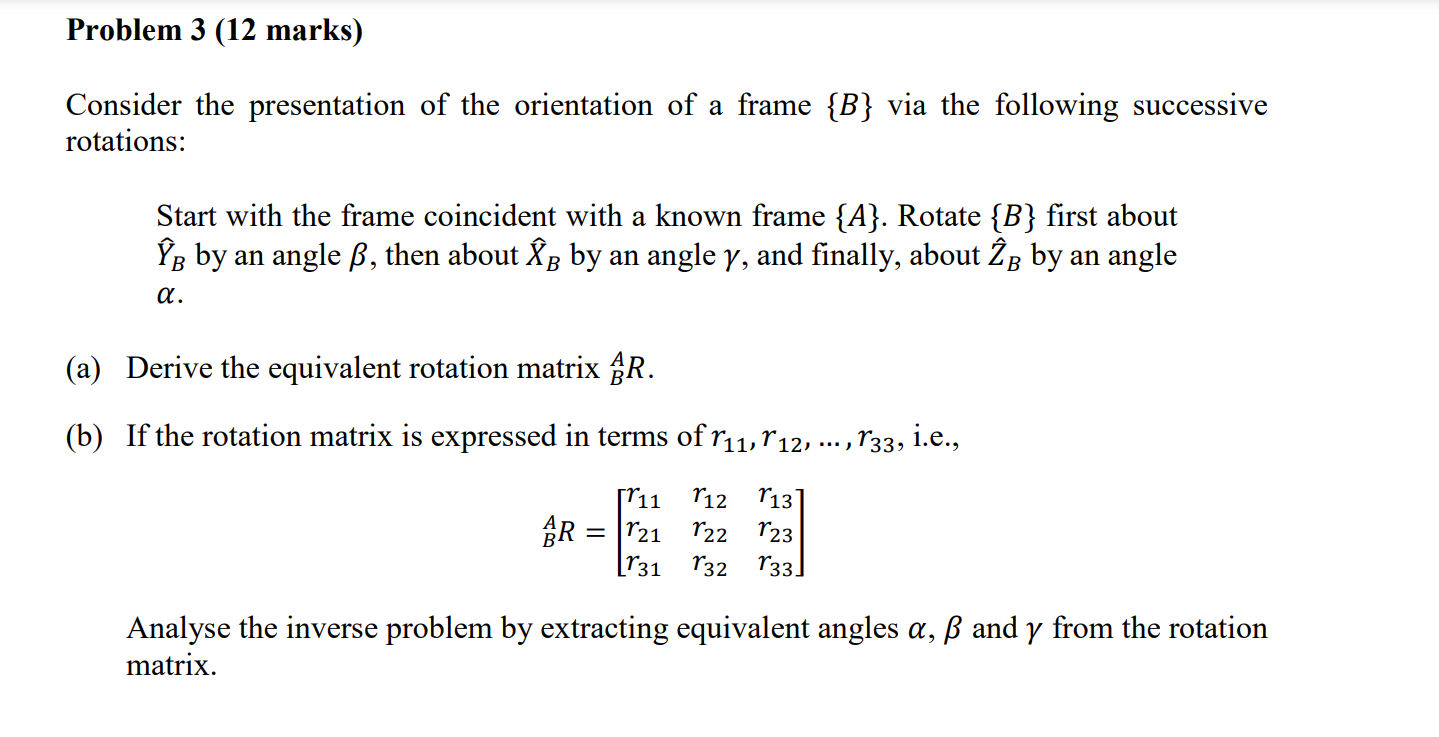
Question: Below shown problem 3. Need help to check if my solution for qn 3a is correct. Need help for qn 3b too as i dont
Below shown problem 3. Need help to check if my solution for qn 3a is correct.
Need help for qn 3b too as i dont know how to solve them
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock