

Question: can someone answer part A from introduction to robotics book MATLAB EXERCISE 4 is exercise focuses on the inverse-pose kinematics solution for the planar 3-DOF
can someone answer part A from introduction to robotics book
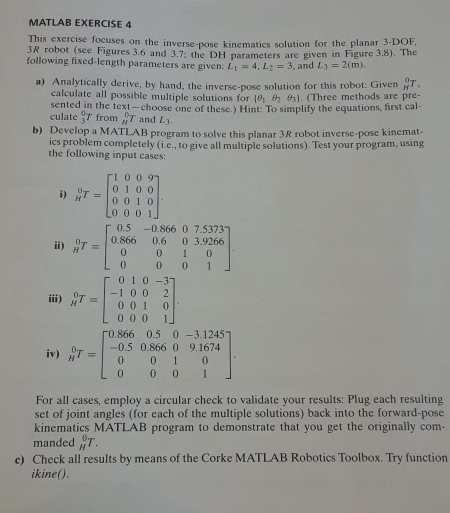
MATLAB EXERCISE 4 is exercise focuses on the inverse-pose kinematics solution for the planar 3-DOF s robot see Figures 3 6 and 3.7: the DH parameters are given in Figure 3.8). The following fixed-length parameters are given: L1-4, L2 3, and L. 2 a) Analytically derive, by hand, the inverse-pose solution for this robot: Given HT calculate all possible multiple solutions for {0, 01, (Three methods are pre- culate fro choose one of these.) Hint To simplity the equations,first cal- b) Develop a MATLAB program to solve this planar 3R robot inverse-pose kinemat- ics problem completely (i.c., to give all multiple solutions). Test your program, using sented in the the following input cases: 10 09 01 0 0 i)HT = 10010 0 001 0.5 -0.866 0 7.5373 0- , _|0.866 0.6 0 3.9266 010-3 iii) OT 1 0 0 2 0 01 0 000 1 0.866 0.5 0 -3.1245 -0.5 0.866 0 9.1674 0 0 0 1 For all cases, employ a circular check to validate your results: Plug each resulting set of joint angles (for each of the multiple solutions) back into the forward-pose kinematics MATLAB program to demonstrate that you get the originally com- manded 7 c) Check all results by means of the Corke MATLAB Robotics Toolbox. Try function ikine
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts