

Question: Choose the correct code to express the following sequence of operations by using Robotics toolbox. Rotation matrix around Z by 50 degrees: Rotation matrix around
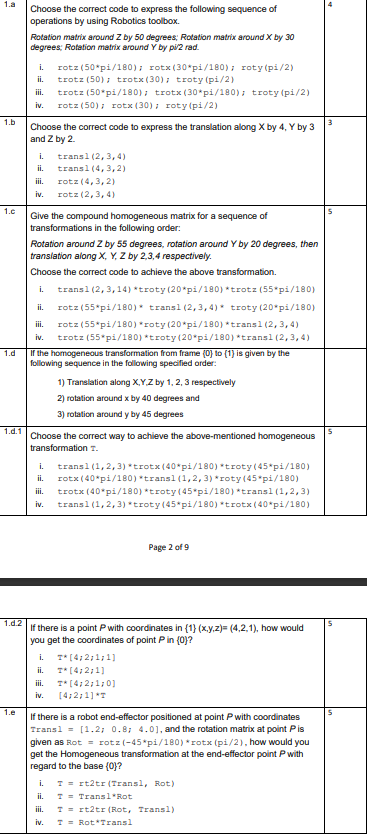
Choose the correct code to express the following sequence of operations by using Robotics toolbox. Rotation matrix around Z by 50 degrees: Rotation matrix around X by 30 degrees: Rotation matrix around Y by pi2 rad. i. rotz (50*pi/180); rotx(30*pi/180); roty (pi/2) ii. trotz (50); trotx (30); troty (pi/2) iii. trotz (50*pi/180); trotx (30pi/180); troty (pi/2) iv. rotz (50); rotx (30); roty (pi/2) 1.b Choose the correct code to express the translation along X by 4. Y by 3 and Z by 2 i. transl (2,3,4) ii. trans1(4,3,2) iii. rotz (4,3,2) iv. rotz (2,3,4) 1.c Give the compound homogeneous matrix for a sequence of transformations in the following order: Rotation around Z by 55 degrees, rotation around Y by 20 degrees, then translation along X, Y, Z by 2,3,4 respectively. Choose the correct code to achieve the above transformation. i. transl (2,3,14) troty (20 pi/190) * trotz (55*pi/180) ii. rotz (55*pi/180) transl (2,3,4) * troty (20 pi/180) iii. rotz (55*pi/180) roty (20pi/180) transl(2,3,4) iv. trotz (55*pi/180) troty (20pi/180) transl (2,3,4) 1.d If the homogeneous transformation from frame (O) to (1) is given by the following sequence in the following specified order: 1) Translation along X,Y.Z by 1, 2, 3 respectively 2) rotation around X by 40 degrees and 3) rotation around y by 45 degrees 1.0.1 Choose the correct way to achieve the above-mentioned homogeneous transformation T. i. transl(1,2,3) trotx (40pi/180) "troty (45*pi/180) ii. rotx (40 *pi/180) "transl (1,2,3) *roty (45*pi/180) iii. trotx (40*pi/180) troty (45*pi/180) transl (1,2,3) iv. transl(1,2,3) troty(45*pi/180) trotx (40pi/180) Page 2 of 9 1.d.2 i. If there is a point P with coordinates in {1} (x.y.z)= (4.2.1), how would you get the coordinates of point P in (0)? T*[4;2;1;1) ii. T*[4;2;1] iii. T*(4,2;1;0) [4;2;1] *T iv. 1.e If there is a robot end-effector positioned at point P with coordinates Transl = [1.2; 0.8; 4.0], and the rotation matrix at point Pis given as Rot = rotz(-45*pi/180) rotx (pi/2), how would you get the Homogeneous transformation at the end-effector point P with regard to the base {0}? i. T = rt2tr (Transl, Rot) ii. T = Transl Rot iii. T = rt2tr (Rot, Transl) iv. T = Rot Transl
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts