

Question: Consider a 3-link cartesian manipulator, (a) Compute the inertia tensor J, for each link i = 1,2, 3 assuming that the links are uniform
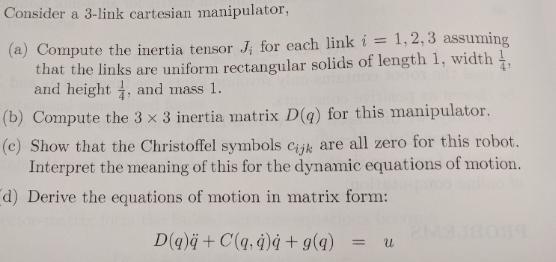
Consider a 3-link cartesian manipulator, (a) Compute the inertia tensor J, for each link i = 1,2, 3 assuming that the links are uniform rectangular solids of length 1, width . and height , and mass 1. %3D (b) Compute the 3 x 3 inertia matrix D(g) for this manipulator. (c) Show that the Christoffel symbols cik are all zero for this robot. Interpret the meaning of this for the dynamic equations of motion. d) Derive the equations of motion in matrix form: D(q)+C(q, 4)4 +g(q)
Step by Step Solution
3.40 Rating (156 Votes )
There are 3 Steps involved in it
To approach this question lets break down each part step by step a Compute the inertia tensor Ji for ... View full answer

Get step-by-step solutions from verified subject matter experts