

Question: Consider a coordinate frame rotated away from another coordinate frame by an angle about the z-axis. (a) Determine the quaternion qz, that describes the resulting
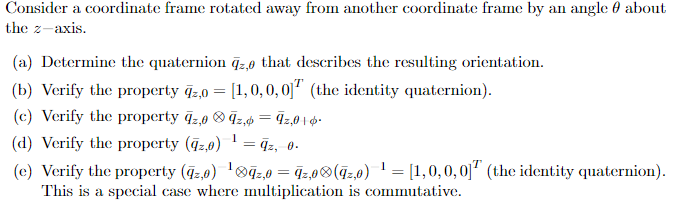
Consider a coordinate frame rotated away from another coordinate frame by an angle about the z-axis. (a) Determine the quaternion qz, that describes the resulting orientation. (b) Verify the property qz,0=[1,0,0,0]T (the identity quaternion). (c) Verify the property qz,qz,=qz,+. (d) Verify the property (qz,)1=qz,. (e) Verify the property (qz,)1qz,=qz,(qz,)1=[1,0,0,0]T (the identity quaternion). This is a special case where multiplication is commutative
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock