

Question: Consider a point robot whose configuration space and workspace is R2. Draw the (complete) visibility graph for the configuration space below. Be sure to draw
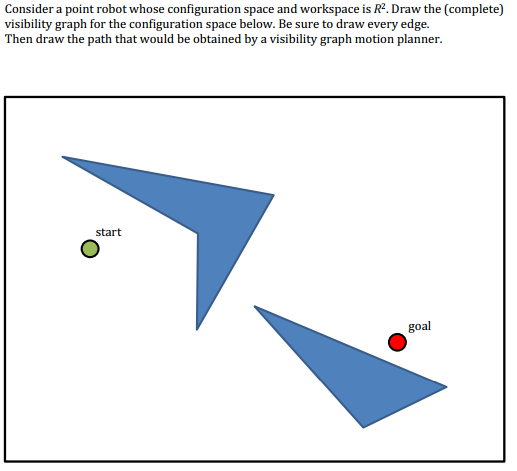
Consider a point robot whose configuration space and workspace is R2. Draw the (complete) visibility graph for the configuration space below. Be sure to draw every edge. Then draw the path that would be obtained by a visibility graph motion planner. start goal Consider a point robot whose configuration space and workspace is R2. Draw the (complete) visibility graph for the configuration space below. Be sure to draw every edge. Then draw the path that would be obtained by a visibility graph motion planner. start goal
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock