

Question: ROBOTICS! i need help as soon as possible plz! pleaseeee its one assigement first part is already solved btw, help with the rest please :)
 first part is already solved btw, help with the rest please :)
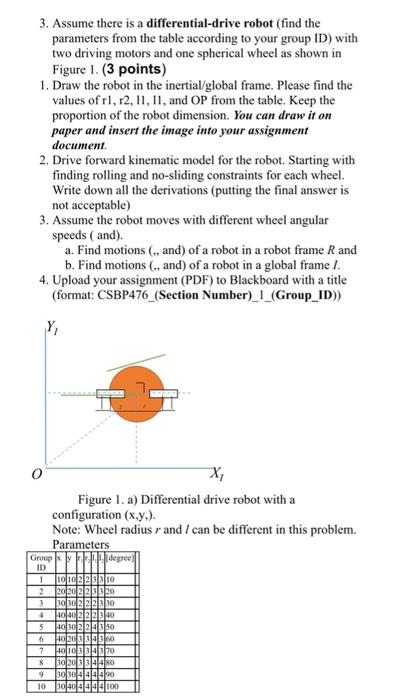
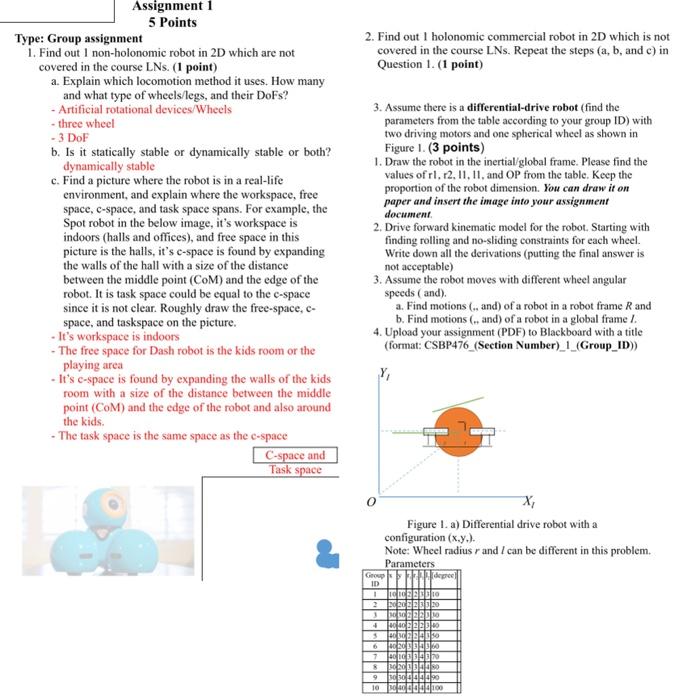
first part is already solved btw, help with the rest please :) Group assignment 1. Find out 1 non-holonomic robot in 2D which are not covered in the course LNs. (1 point) a. Explain which locomotion method it uses. How many and what type of wheels/legs, and their DoFs? - Artificial rotational devices/Wheels - three wheel - 3 DoF b. Is it statically stable or dynamically stable or both? dynamically stable c. Find a picture where the robot is in a real-life environment, and explain where the workspace, free space, c-space, and task space spans. For example, the Spot robot in the below image, it's workspace is indoors (halls and offices), and free space in this picture is the halls, it's c-space is found by expanding the walls of the hall with a size of the distance between the middle point (CoM) and the edge of the robot. It is task space could be equal to the c-space since it is not clear. Roughly draw the free-space, cspace, and taskspace on the picture. - It's workspace is indoors - The free space for Dash robot is the kids room or the playing area - It's c-space is found by expanding the walls of the kids room with a size of the distance between the middle point (CoM) and the edge of the robot and also around the kids. - The task space is the same space as the c-space 2. Find out 1 holonomic commercial robot in 2D which is not covered in the course LNs. Repeat the steps (a, b, and c) in Question 1. (1 point) 3. Assume there is a differential-drive robot (find the parameters from the table according to your group ID) with two driving motors and one spherical wheel as shown in Figure 1. (3 points) 1. Draw the robot in the inertial/global frame. Please find the values of r1,r2,11,11, and OP from the table. Keep the proportion of the robot dimension. You can draw it on paper and insert the image into your assignment document. 2. Drive forward kinematic model for the robot. Starting with finding rolling and no-sliding constraints for each wheel. Write down all the derivations (putting the final answer is not acceptable) 3. Assume the robot moves with different wheel angular speeds ( and). a. Find motions (., and) of a robot in a robot frame R and b. Find motions (, and) of a robot in a global frame I. 4. Upload your assignment (PDF) to Blackboard with a title (format: CSBP476_(Section Number)_1_(Group_ID)) Figure 1. a) Differential drive robot with a configuration (x,y,). Note: Wheel radius r and l can be different in this problem. Type: Group assignment 2. Find out 1 holonomic commercial robot in 2D which is not 1. Find out 1 non-holonomic robot in 2D which are not covered in the course LNs. Repeat the steps (a, b, and c) in covered in the course LNs. (1 point) Question 1. (1 point) a. Explain which locomotion method it uses. How many and what type of wheels/legs, and their DoFs? - Artificial rotational devices/Wheels 3. Assume there is a differential-drive robot (find the - three wheel parameters from the table according to your group ID) with 3 DoF two driving motors and one spherical wheel as shown in b. Is it statically stable or dynamically stable or both? Figure 1. (3 points) dynamically stable 1. Draw the robot in the inertial/global frame. Please find the c. Find a picture where the robot is in a real-life values of rl,r2,11,11, and OP from the table. Keep the environment, and explain where the workspace, free proportion of the robot dimension. You can draw it on space, c-space, and task space spans. For example, the paper and insert the image into your assignment Spot robot in the below image, it's workspace is document. indoors (halls and offices), and free space in this 2. Drive forward kinematic model for the robot. Starting with picture is the halls, it's c-space is found by expanding finding rolling and no-sliding constraints for each wheel. the walls of the hall with a size of the distance Write down all the derivations (putting the final answer is between the middle point (CoM) and the edge of the not acceptable) robot. It is task space could be equal to the c-space 3. Assume the robot moves with different wheel angular since it is not clear. Roughly draw the free-space, cspeeds ( and). space, and taskspace on the picture. a. Find motions (., and) of a robot in a robot frame R and b. Find motions (n, and) of a robot in a global frame I. - It's workspace is indoors 4. Upload your assignment (PDF) to Blackboard with a title - The free space for Dash robot is the kids room or the (format: CSBP476_(Section Number)_1_(Group_ID)) playing area - It's c-space is found by expanding the walls of the kids room with a size of the distance between the middle point ( CoM) and the edge of the robot and also around the kids. - The task space is the same space as the e-space Figure 1. a) Differential drive robot with a configuration (x,y, . Note: Wheel radius r and l can be different in this problem. Parameters
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts