

Question: Consider a PP robot shown below. The coordinate frames are defined as shown. 92 91 y1 m2g m1g y2 Z1 Z2 = The mass
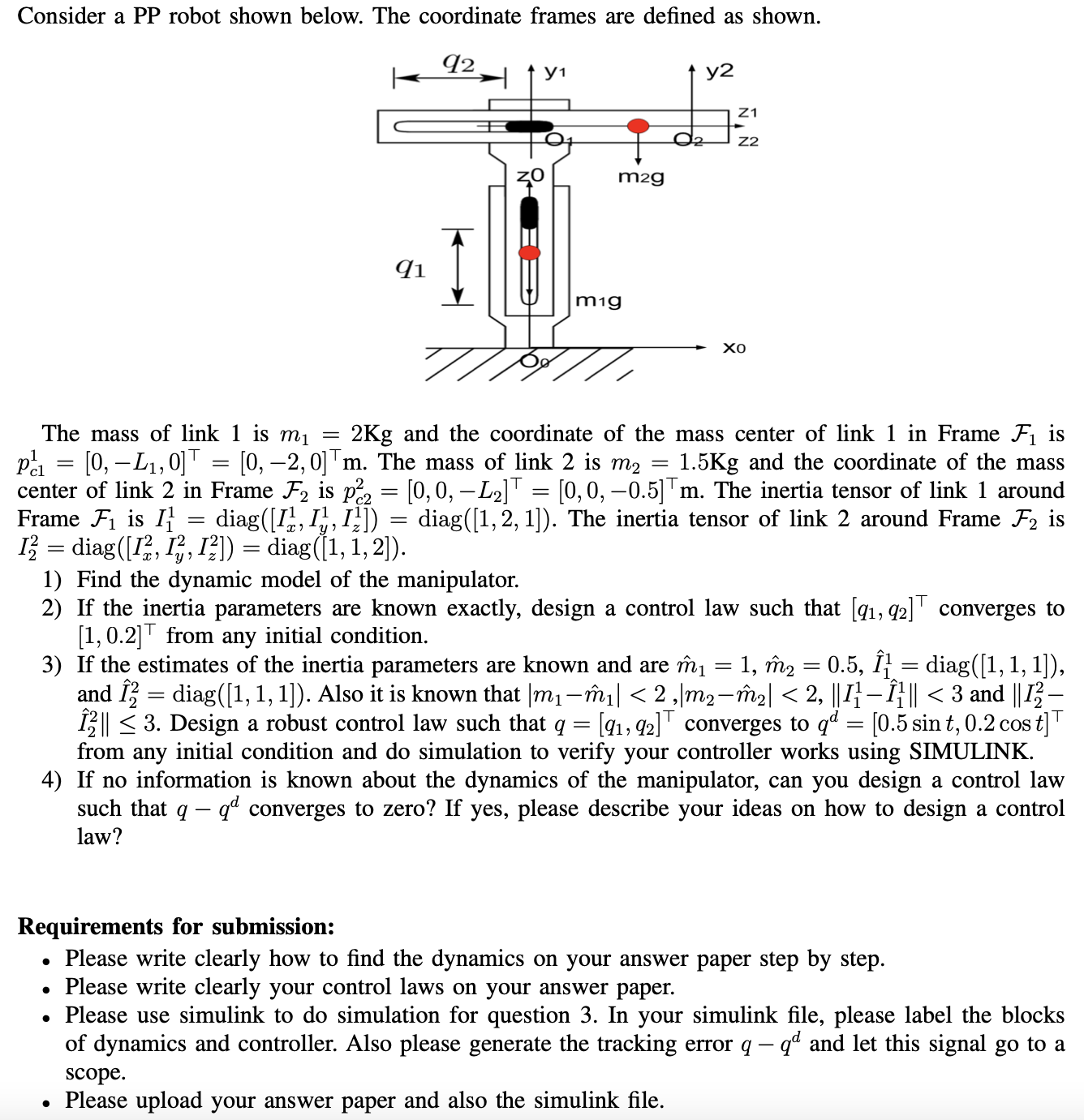
Consider a PP robot shown below. The coordinate frames are defined as shown. 92 91 y1 m2g m1g y2 Z1 Z2 = The mass of link 1 is m = 2Kg and the coordinate of the mass center of link 1 in Frame F is P = [0, L, 0] = [0, -2,0]Tm. The mass of link 2 is m = 1.5Kg and the coordinate of the mass center of link 2 in Frame F is p2 = [0, 0, L]T = [0, 0, 0.5]m. The inertia tensor of link 1 around Frame F is I diag([1, 1, 1]) = diag([1,2,1]). The inertia tensor of link 2 around Frame F2 is 1 = diag([12, 13, 1]) = diag([1, 1, 2]). Xo 1) Find the dynamic model of the manipulator. converges to 2) If the inertia parameters are known exactly, design a control law such that [91, 92] [1, 0.2] from any initial condition. and 12 = 3) If the estimates of the inertia parameters are known and are m = 1, m = 0.5, = diag([1, 1, 1]), = diag([1, 1, 1]). Also it is known that |mm| < 2,|m2| < 2, ||I || < 3 and || 1. || 3. Design a robust control law such that q = [91, 92] converges to q = [0.5 sin t, 0.2 cost] from any initial condition and do simulation to verify your controller works using SIMULINK. 4) If no information is known about the dynamics of the manipulator, can you design a control law such that q- qd converges to zero? If yes, please describe your ideas on how to design a control law? scope. Please upload your answer paper and also the simulink file. Requirements for submission: Please write clearly how to find the dynamics on your answer paper step by step. Please write clearly your control laws on your answer paper. Please use simulink to do simulation for question 3. In your simulink file, please label the blocks of dynamics and controller. Also please generate the tracking error q qd and let this signal go to a -
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts