

Question: Consider a robot whose operation is described by the following PDDL operators:The operators allow the robot to hold more than one object. Show how to
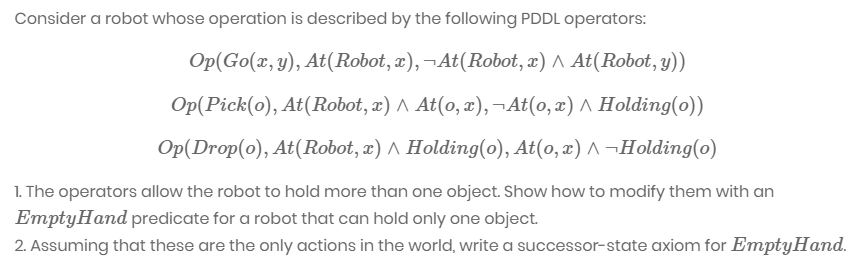
Consider a robot whose operation is described by the following PDDL operators:The operators allow the robot to hold more than one object. Show how to modify them with an
EmptyHand predicate for a robot that can hold only one object.
Assuming that these are the only actions in the world, write a successorstate axiom for EmptyHand.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock