

Question: Consider a satellite-tracking radar site on a spherical planet that is not rotating. The radar site is at point P. Standing at this site,
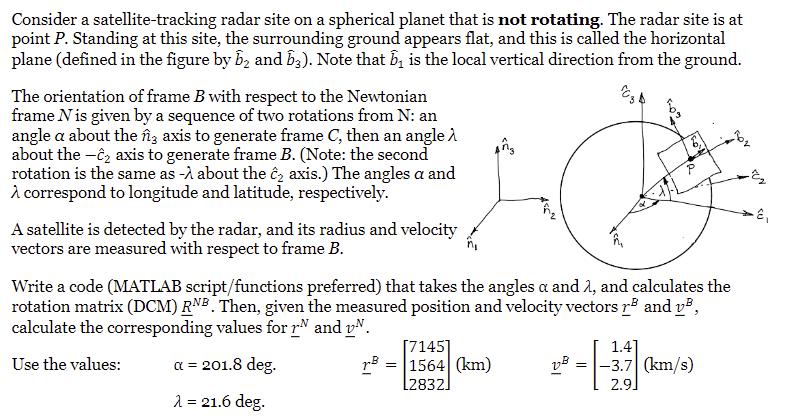
Consider a satellite-tracking radar site on a spherical planet that is not rotating. The radar site is at point P. Standing at this site, the surrounding ground appears flat, and this is called the horizontal plane (defined in the figure by b and b). Note that b is the local vertical direction from the ground. The orientation of frame B with respect to the Newtonian frame N is given by a sequence of two rotations from N: an angle a about the 3 axis to generate frame C, then an angle A about the -2 axis to generate frame B. (Note: the second rotation is the same as - about the 2 axis.) The angles a and correspond to longitude and latitude, respectively. A satellite is detected by the radar, and its radius and velocity vectors are measured with respect to frame B. 31 P Write a code (MATLAB script/functions preferred) that takes the angles a and 1, and calculates the rotation matrix (DCM) RNB. Then, given the measured position and velocity vectors r and v, calculate the corresponding values for r and N. Use the values: a = 201.8 deg. = 21.6 deg. 1-B [7145] =1564 (km) vB == 1.4] -3.7 (km/s) [2832] 2.9]
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts