

Question: Consider the 2-DOF planar robot manipulator shown below The robot links are assumed as slender rods and the parameters needed for the simulations are
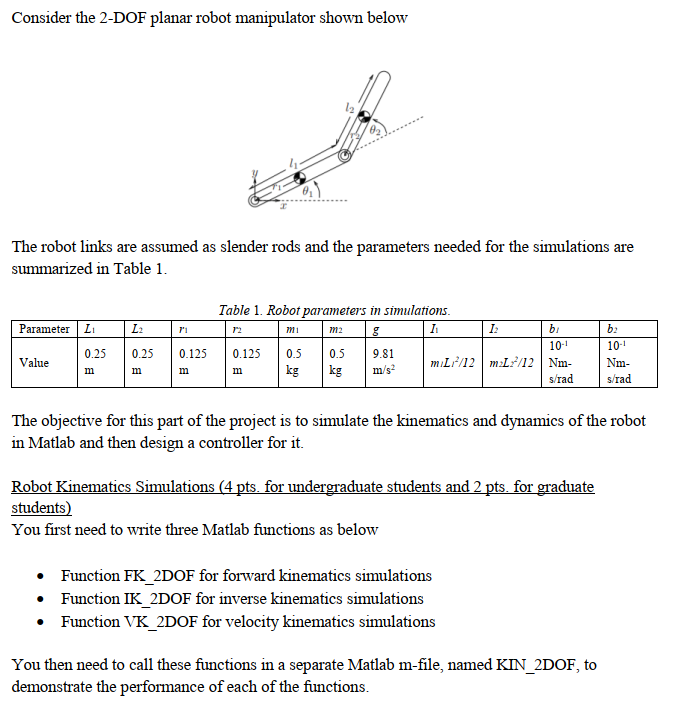
Consider the 2-DOF planar robot manipulator shown below The robot links are assumed as slender rods and the parameters needed for the simulations are summarized in Table 1. Table 1. Robot parameters in simulations. Parameter Li L2 12 m1 m2 g 11 12 bi b2 10-1 10-1 0.25 0.25 0.125 0.125 0.5 0.5 9.81 Value m m m m kg kg m/s miL/12 mL/12 | Nm- Nm- s/rad s/rad The objective for this part of the project is to simulate the kinematics and dynamics of the robot in Matlab and then design a controller for it. Robot Kinematics Simulations (4 pts. for undergraduate students and 2 pts. for graduate students) You first need to write three Matlab functions as below Function FK_2DOF for forward kinematics simulations Function IK_2DOF for inverse kinematics simulations Function VK_2DOF for velocity kinematics simulations You then need to call these functions in a separate Matlab m-file, named KIN_2DOF, to demonstrate the performance of each of the functions.
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts