

Question: Question 2 ( Total: 4 0 marks ) Consider the 2 - DOF planar robotic manipulator that is conceptually depicted in Figure Q 2 .
Question Total: marks
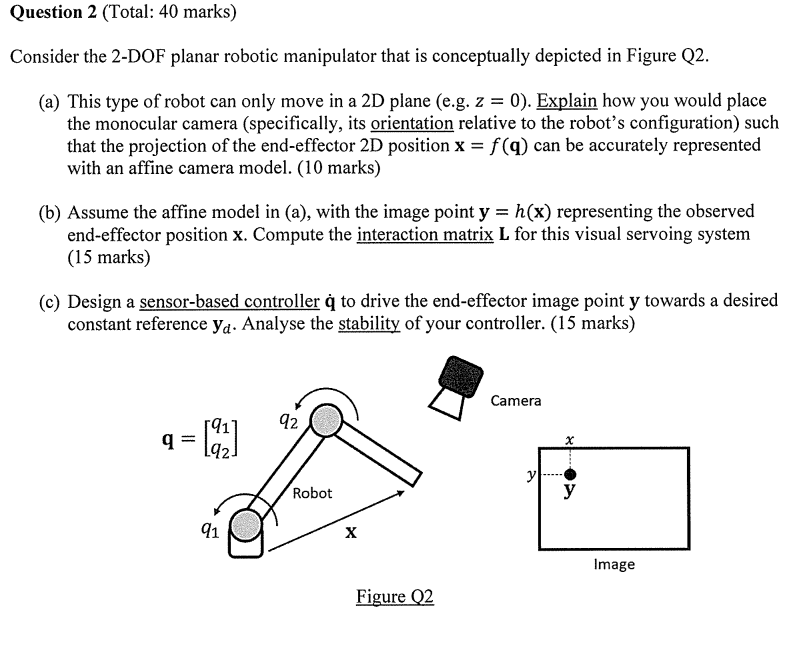
Consider the DOF planar robotic manipulator that is conceptually depicted in Figure Q
a This type of robot can only move in a D plane eg z Explain how you would place the monocular camera specifically its orientation relative to the robot's configuration such that the projection of the endeffector D position mathbfxfmathbfq can be accurately represented with an affine camera model. marks
b Assume the affine model in a with the image point mathbfyhmathbfx representing the observed endeffector position mathbfx Compute the interaction matrix mathbfL for this visual servoing system marks
c Design a sensorbased controller dotmathbfq to drive the endeffector image point mathbfy towards a desired constant reference mathbfyd Analyse the stability of your controller. marks
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock