

Question: Consider the following feedback loop arrangement outlined in Figure 4. Assume that disturbances d(s) enter the system as shown in the diagram. It is
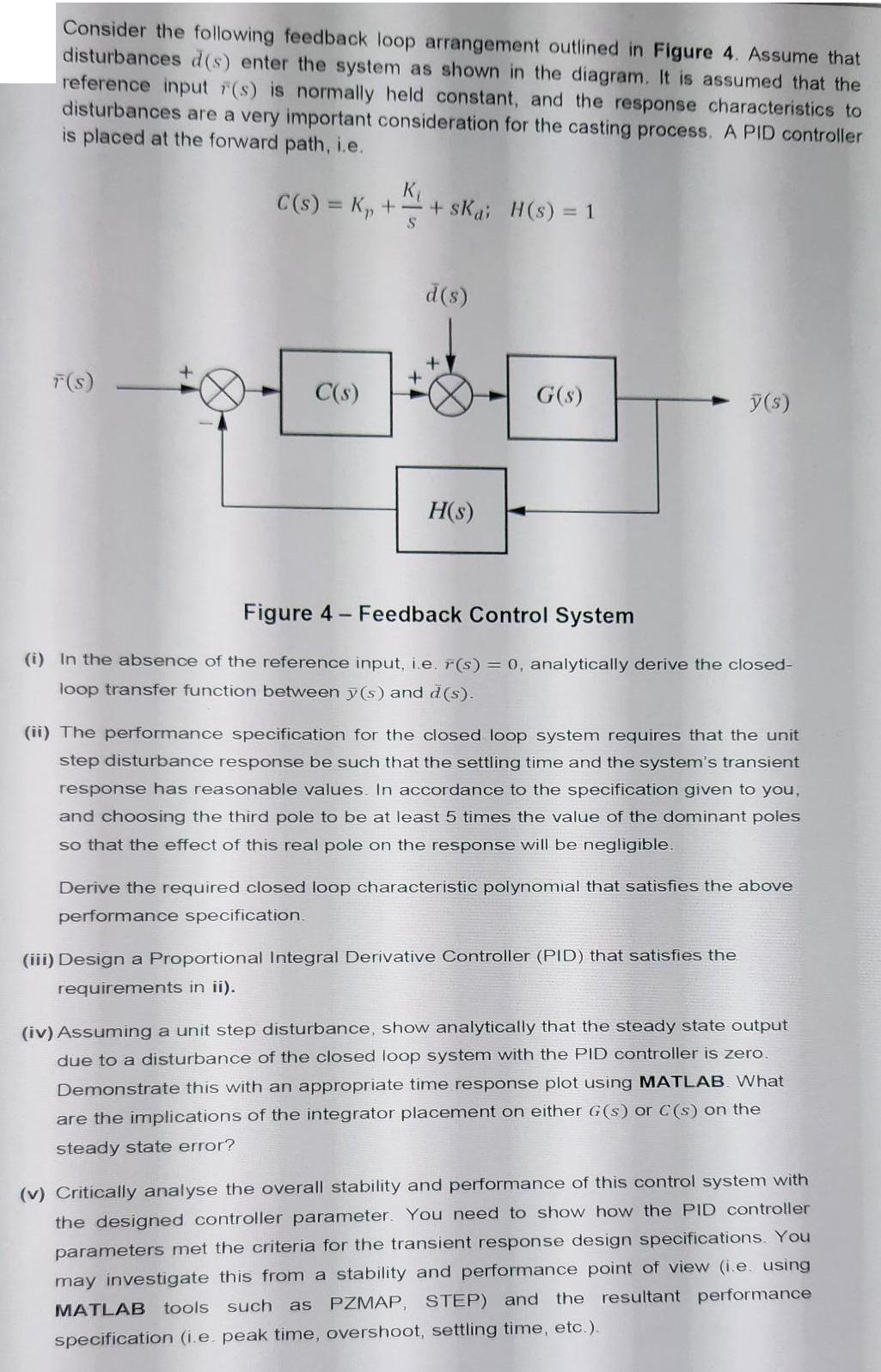
Consider the following feedback loop arrangement outlined in Figure 4. Assume that disturbances d(s) enter the system as shown in the diagram. It is assumed that the reference input (s) is normally held constant, and the response characteristics to disturbances are a very important consideration for the casting process, A PID controller is placed at the forward path, i.e. r(s) K C(s) = K + +sKai H(s) = 1 S C(s) d(s) H(s) G(s) Y(s) Figure 4 Feedback Control System (i) In the absence of the reference input, i.e. r(s) = 0, analytically derive the closed- loop transfer function between y(s) and d (s). (ii) The performance specification for the closed loop system requires that the unit step disturbance response be such that the settling time and the system's transient response has reasonable values. In accordance to the specification given to you, and choosing the third pole to be at least 5 times the value of the dominant poles so that the effect of this real pole on the response will be negligible. Derive the required closed loop characteristic polynomial that satisfies the above performance specification. (iii) Design a Proportional Integral Derivative Controller (PID) that satisfies the requirements in ii). (iv) Assuming a unit step disturbance, show analytically that the steady state output due to a disturbance of the closed loop system with the PID controller is zero. Demonstrate this with an appropriate time response plot using MATLAB What are the implications of the integrator placement on either G(s) or C(s) on the steady state error? (v) Critically analyse the overall stability and performance of this control system with the designed controller parameter. You need to show how the PID controller parameters met the criteria for the transient response design specifications. You may investigate this from a stability and performance point of view (i.e. using MATLAB tools such PZMAP, STEP) and the resultant performance specification (i.e. peak time, overshoot, settling time, etc.). as
Step by Step Solution
3.42 Rating (149 Votes )
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts