

Question: Consider the robots shown in the below figures. i . Assign the coordinate frames for each robot. ii . Find the Denavit - Hartenberg
Consider the robots shown in the below figures.
i Assign the coordinate frames for each robot.
ii Find the DenavitHartenberg mathrmDH parameters for these robots, in the form of a table.
iii. Find the overall transformation matrix Tj relating the endeffector frame to the base frame for each robot.
Programming Q: Based on the transformation matrix computed in iii write a computer program using C C Julia, python, or MATLAB for one of the robots choose one that simulates the forward kinematics with demonstrated results assume joint variable values as an example to show the calculated location of the endeffector position and orientation
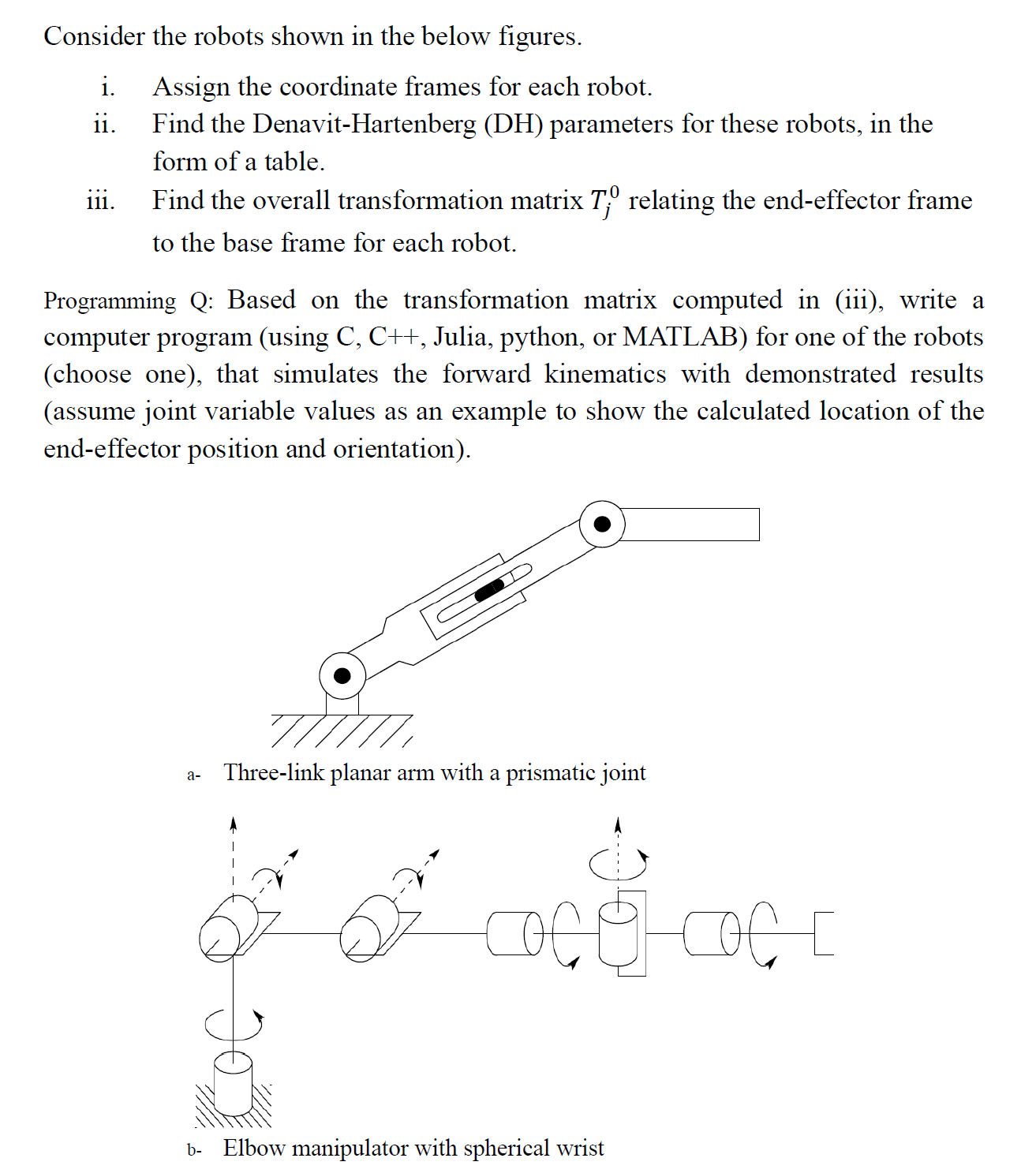
a Threelink planar arm with a prismatic joint c Cartesian manipulator with spherical wrist
d PUMA manipulator
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock